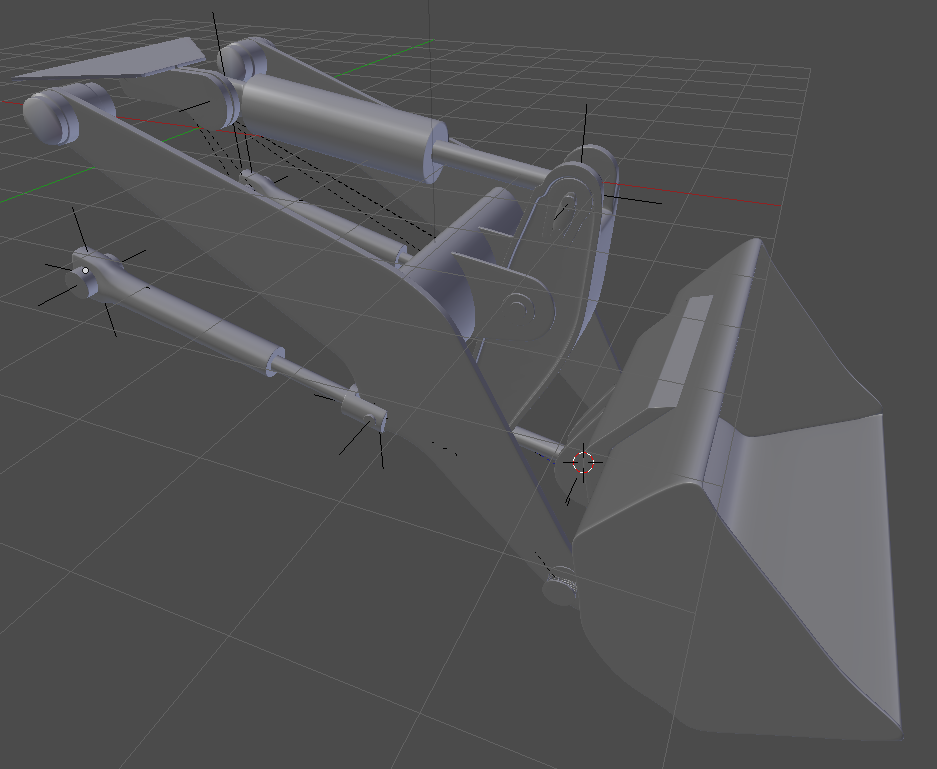
I am trying to rig the below. It is mostly done (using a series of empties and constraints), but I am having a problem with the scoop part. I would appreciate any help.
Why ate You doing this like that instead using armature and rig?
bees I ate already
Thanks for the help community…the easy way was to apply a transforms constraint
looks very cool… sounds like you solved the problem then?
Yes, without bones. When I get around to it I will render and post on this site.
I agree with your approach of using empties and constraints for mechanical models. Try to get your head around Drivers, where you can use mathematical functions such as sine, cosine, targets, pi, squares, etc, etc, as these give you even better results than simple transforms, which can get glitchy if you string too many together, whereas drivers can be expressly and precisely controlled. As an example, use 3.142 in a transformer constraint to control a movement, operate the mechanisms 30 revolutions of a controlling empty and see the errors stack up. then repeat the process with a driver and something like (var * pi) as a Scripted Driver Expression and see that the errors DO NOT stack up. Just remember that all Driver rotations are in RADIANS not degrees, so you will use pi more often (there are 2 * pi radians in one revolution or 360 degrees) Cheers, Clock.
If you post the blend file here, I can add my empties from my model so you can see how the drivers work, my model is as below:

Just watch out that your rig works when you move the front end of the digger or the entire model, also check that you have no closed track-to constraints loops, i.e. empty one is tracked to empty two and empty two is tracked to empty one, or you will get glitches. A good test is to turn you crank arm over many times then press escape to reset it. It should reset back to rest position without any errors or anything out of position. I note that your bucket tip mechanism’ cylinder mount point is not centred on the arm rotate point, this means that the bucket will tip up or down as you raise the arm - it is normal practice to have the tip cylinder mount point concentric with the arm rotate point. 