Still confused.
Are we talking about animated (tank) treads?
Getting a robot to turn on, and follow the player?
Or getting a Navmesh to work?
IMHO animated texture on tank treads look worse of all to me, because there is no shadow play. A minor detail, but I can’t help you there.
OK, so you want the player to turn on the robot, play a sound, and have the robot follow the player, is that right? Simple, use states.
You can do it without a navmesh, but you’ll need some python to align the robot, to the same vector as the player. And place the robot at a location near the player. Use a keyboard sensor to set parent.
Parenting the robot to the player.
Then use distance constraints to keep the robot at a certain distance from the player. But you run the risk of having the robot get stuck on corners, or sharp turns.
Using a navmesh would be easier, as it will do the aligning for you.
Use states.
But you can’t get the navmesh working?
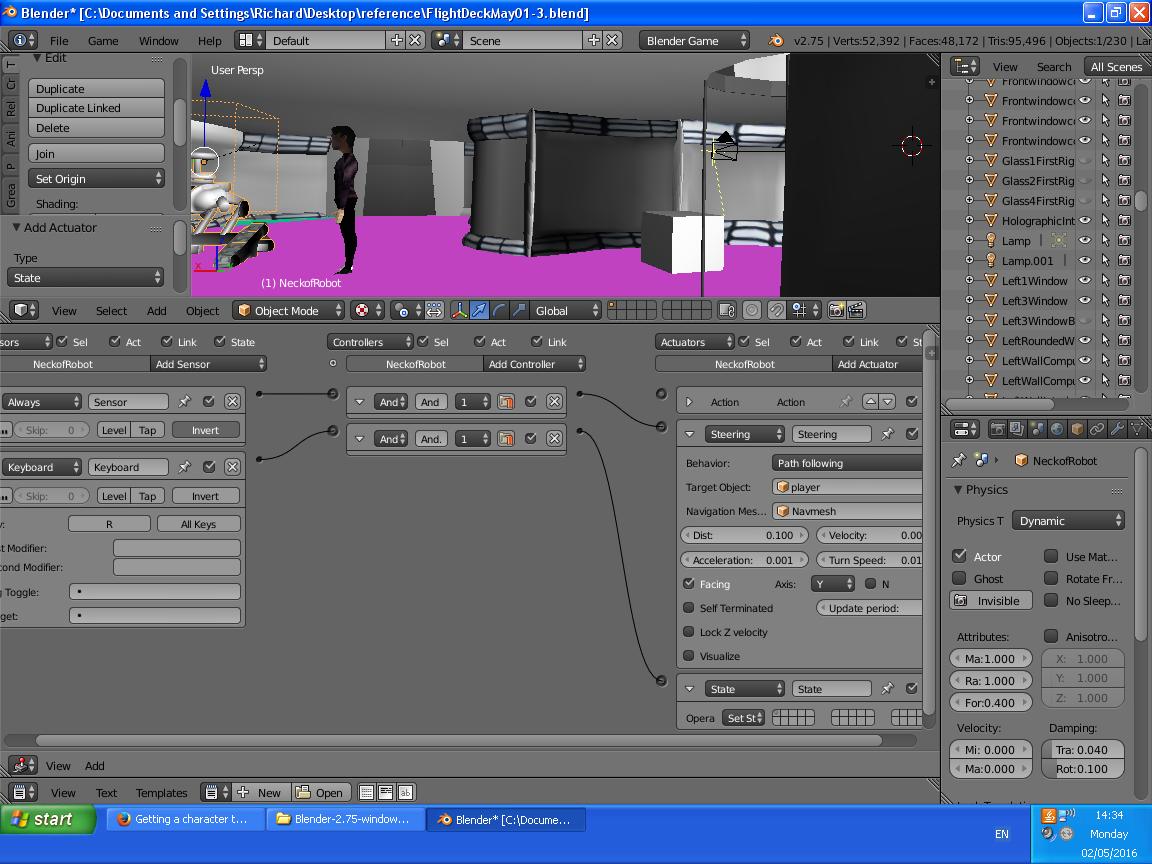
On the robots steering actuator,
Set the distance (relax distance) to keep the robot a certain distance from the player.
Make sure the player is the target.
Navmesh is correct one, if there’s more than one.
Make sure the steering actuator is set to pathfollow.
Make sure both player and robot are actors.
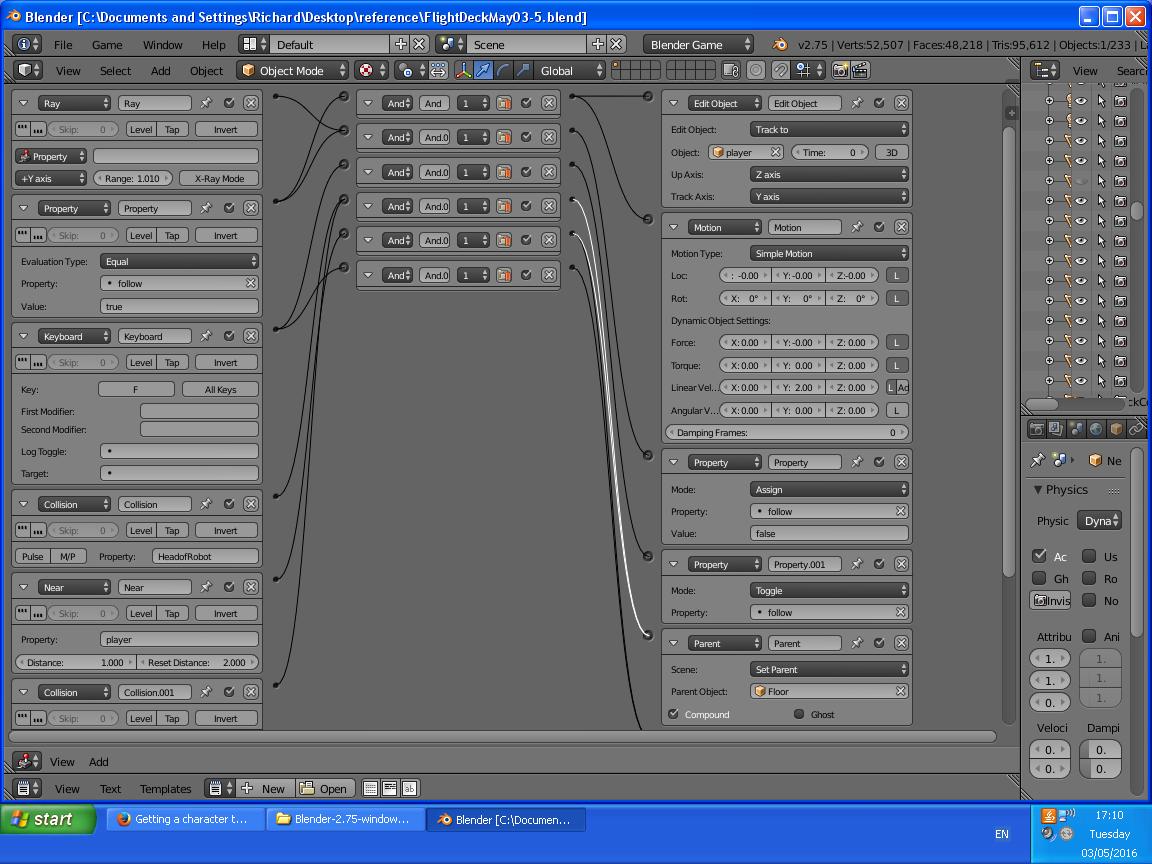
Set your states on the robots “and controller”, by clicking the plus sign to the left of the “and controller”. All those boxes on the “and controller” are states. (the top 30)
click the first box, that will be state 1,
Simple example;
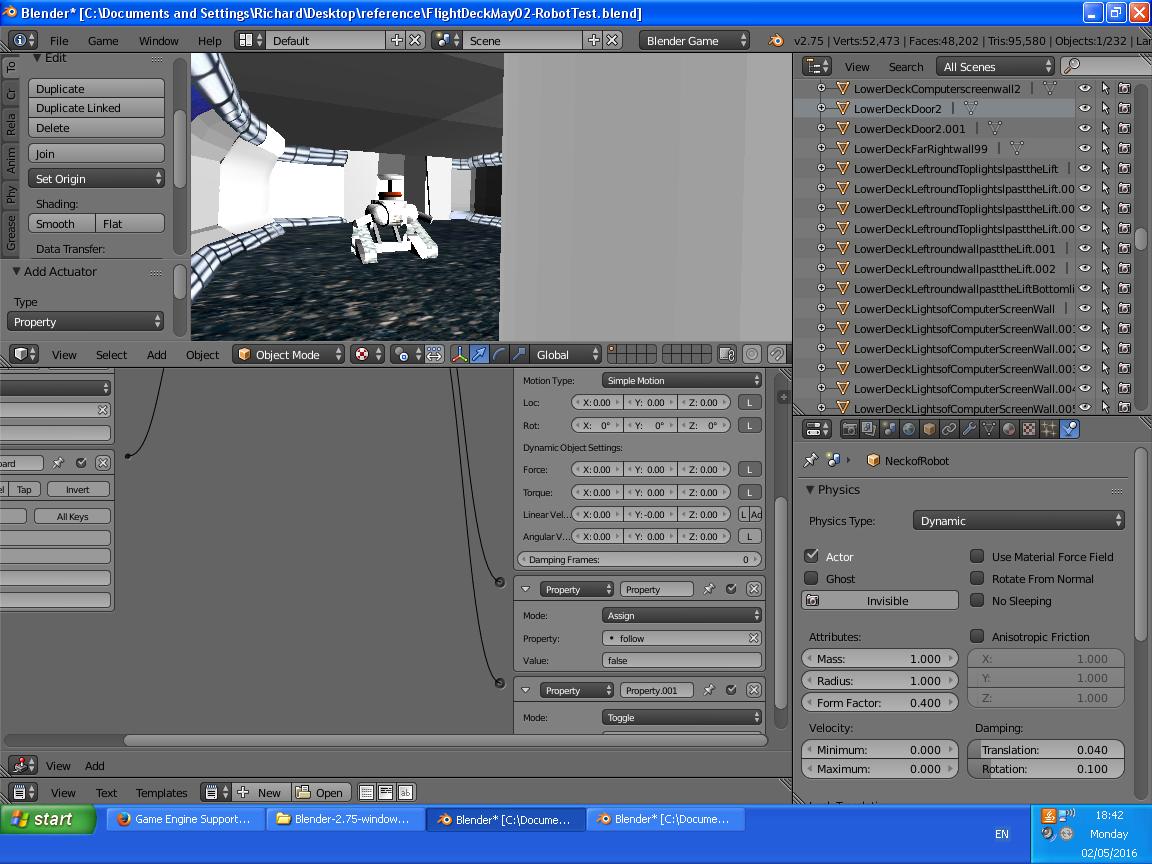
State 1 (robot off)
keyboard whatever---------and------------state > set state 2 (click the box next to state 1)
State 2 (robot sound, armed & waiting to go)
Delay 1 (or always)------------and-----------------sound > play end (to play the sound all the way to the end)
keyboard whatever(can be the same key as above)---------and---------state 3 (click the box next to state 2)
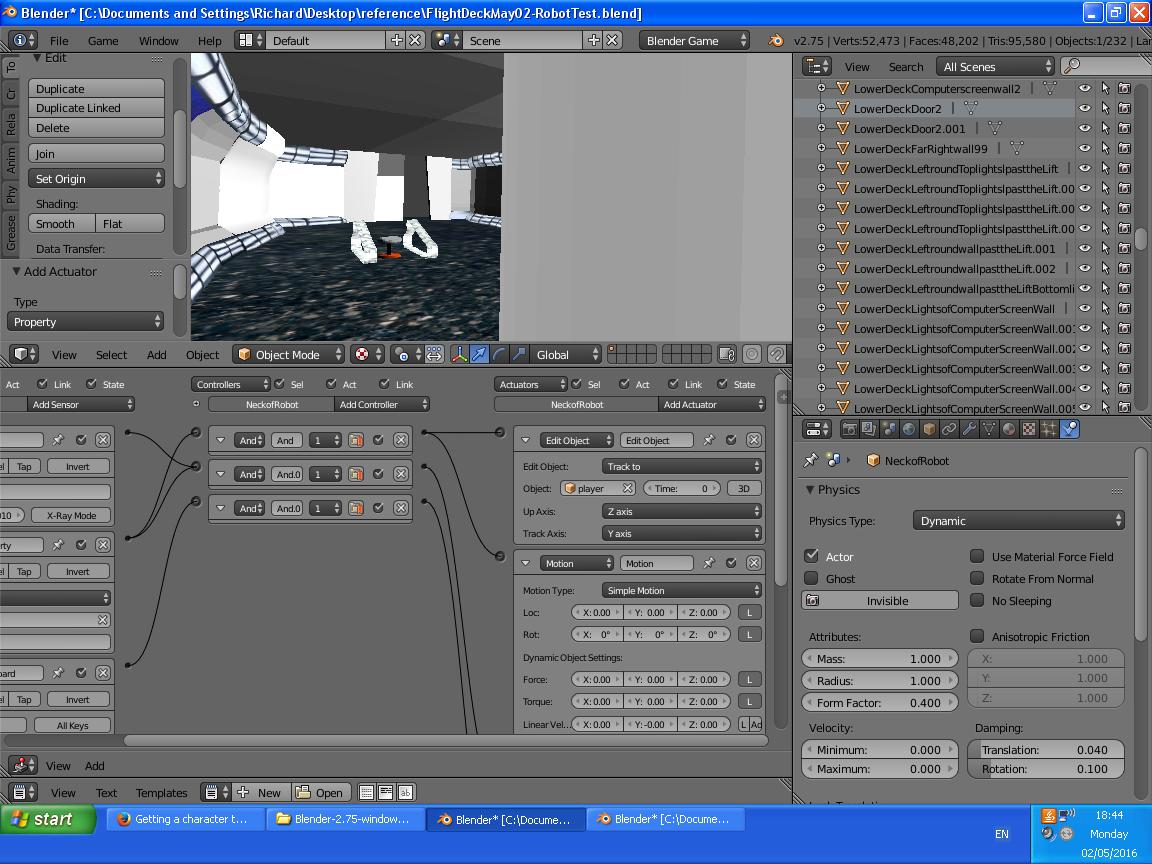
state 3 (follow the player)
always------------and------------steering and whatever animation. (select both armature, and robot, interconnect robots “and controller”, to armatures action.)
Keyboard (can be the same)---------and-----------state 1 (to turn robot off)
something like that.
Your robot may still get stuck on the corners, I would use a octagonal collision box instead of rectangle or square. Helps a little.
Hope this wall of text helps