sorry but i don’t know how to delete this post… so i delete the text
Hi Nawwaf!
What Operating system do you use?
If you use a Linux, you can se if it is 32 or 64 bis with this commands:
- uname -a
or
- file /bin/bash | cut -d’ ’ -f3
This will show you what is your system.
I need you make this to continue helping you with other steps.
A big hug!
Thanks Scrible. I wasn’t able to get the ISO that low, but with a better lighting setup I’m starting to get some very nice results. Still using AutoDesk for now. I’ll experiment more with PPT when I have time - busy travelling for the next week or so.
Hi Rhysy!
This is great. Can you share the pictures again?
A big hug!
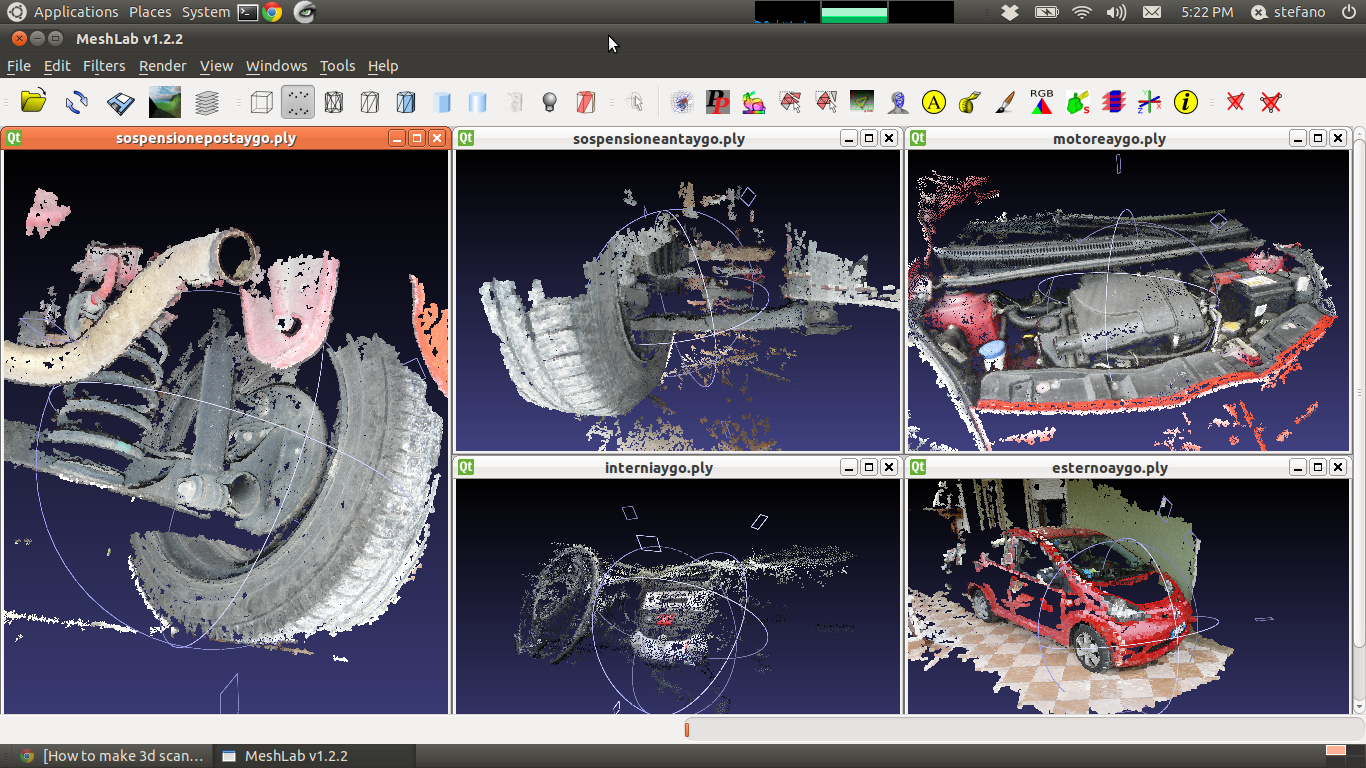
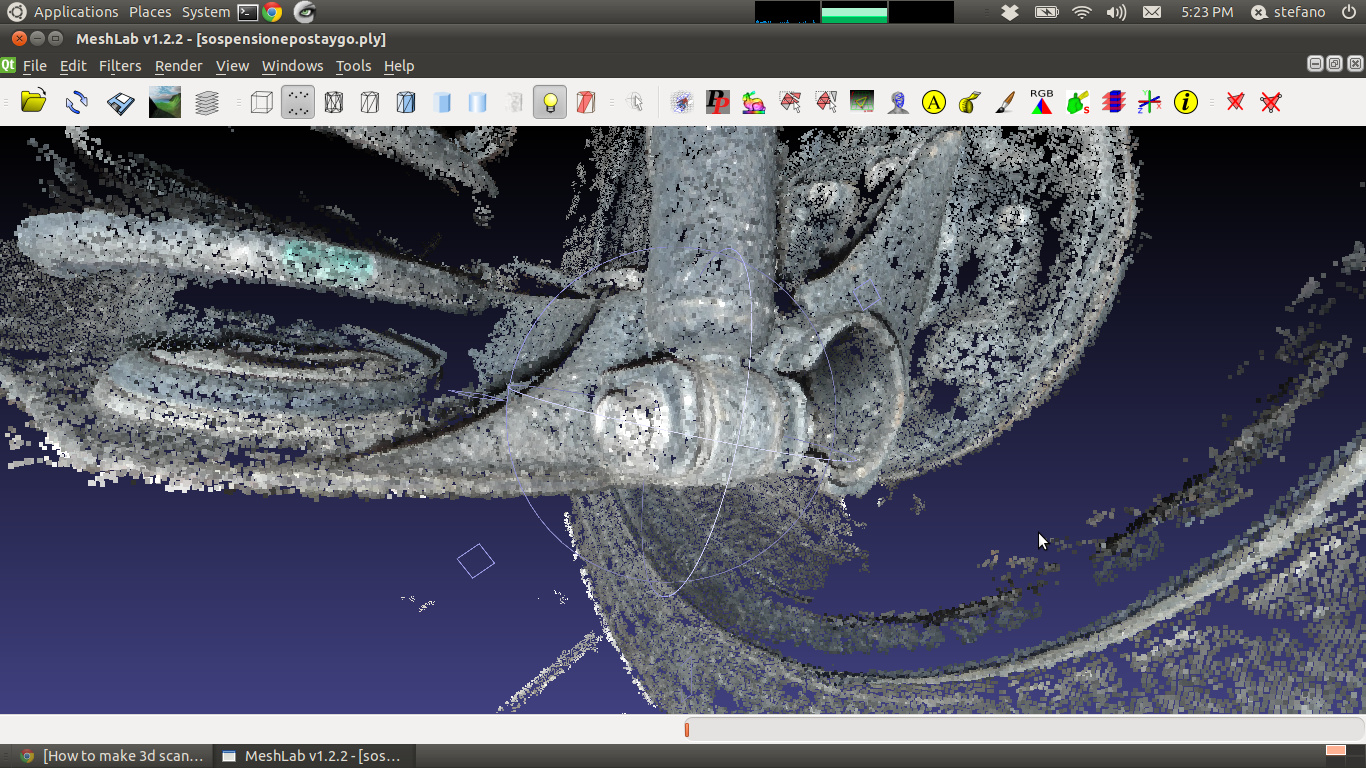
I made some scans too!
Good point clouds, but not so good for automatic meshing… Reflective surfaces are a nightmare ![]()
Some scans of a Toyota Aygo, with a particular of the rear damper mounting point…
stez90: This is great!
I really want to try this out on my linux mint 13 64bit pc, though installing the pyqt4 api is giving me some problems… I’m not a very tech-y linux user, but I know the basics… I need to install python-qt4, and I’ve tried doing it through the software manager, synaptic package manager and though the terminal (sudo apt-get install python-qt4). nothing works, (i get “err: [repo] 404 not found [IP]” on every package) any tips? Probably a PEBKAC error of some sort 
The scans so far looks great!
Hi cogitas, perfect post!
I love architecture and I’m looking forward to capture some real meshes and pack them into a .blend file 
I downloaded ArcheOS and i’m doing everithing exactly as it is in this tutorial Link.
When i try to open final .pty in MeshLab, it encounters an EOF error. Nothing noticible (no Error spec.) in Terminal window. Still it seems that final .pty is somehow corrupted. Did you have any idea?
Thanks in advance!
Oh, man this is literally HUGE! ![]()
I also tried the tutorial you posted (i think the’re very near to each other) and i couldn’t open .pty in the middlestep either. 
HI RhinoFlip,
if I understood well your problem is the EOF (End Of File) while loading your .ply file in MeshLab. This probably happened because you installed ArcheOS in a language that is not English, so that PPT (Python Photogrammetry Toolbox) works in the american way and Meshlab in the european (or the opposite, I don not rememeber…). This mean that PPT writes the .ply source file with the american schema (units - dot- decimals, e.g. 1.346) amd MeshLab expects a .ply file in which the numbers are written in the european way (units - comma - decimals, e.g. 1,346). The only thing you can do is to open the .ply with a text editor (e.g. Kate in ArcheOS), than look for the comma “replace” and replace all the points in the file with comma (or the opposite, as I wrote, now I don’t remember). Than save your file again and you will be able to load it in MeshLab. Another system could be to use another mesh-editing toll, like Cloud Compare but it could have the same problem).
I hope it was useful.
PS
If you have feedback about this process or new experiments, can you report them in the blog ATOR (http://arc-team-open-research.blogspot.it/)? It will help us to develop better ArcheOS next release.
Ciao.
Luca! Molte grazie! (I assume you’re Italian)
I think somebody yet mentioned that very issue in this thread. But i really did not understand that. So you made it clear for me and i will try it tomorrow and finish the tutorial. So that I’ll make report and notice your community.
What comes to my mind, is that you should either repair PPT result file (which should be long process) or recommend english package an installation wizzard. What is strange too is that it didn’t ask me to input root password at the installation process, but as I’m familiar with distros, it didn’t bother me that much. Just to notice :D.
Gracie per tutto!
Pippo
I am going to need a topography mapping software like this that is fast and native to blender, can some one port it?
I am working on a open source human walking assistance “game” that will one day run a real set of servos on a set of “ubber polio braces” that have light weight cables that run into a back pack,
the cables act as both sides of a muscle and attach to a “Arc driver” (I came up with it) it’s basically a non-uniform screw pattern, that can both be the transmission factoring device, and the “Curve Guide” represents a non-uniform motion,
it will run on 2 12 volt lithium stacks, normal and emergency power…
this will be a testbed for physical walk cycles using torque or angle targets,
I want to use a navmesh to “map” a walk-able path using two cameras and a active sonar system(or anything that can identify “soft” materials that can be stepped on,
It will be a very long hard road, but I want to print one via rep rap by 2016
Help?
Attachments

HI BluePrintRandom,
I am not sure I understood what you nee, but maybe that is related with SLAM algoythms?
In this csae there should be some FLOSS applications to do this.
I am not a Blender expert, but there should be also something useful for you in Blender, like the camera tracking or this library:
http://code.google.com/p/libmv/
Libmv is also developed by Pierre Moulon, the guy who did also Python Photogrammetry Tollbox. My brother and I (especially him) just developed the (very) simple GUI and packages the software for ArcheOS, but Pierre is the real developer.
I hope it was useful,
ciao.
Hi Luca, since your great results with ppt, do you have any suggestion how to shoot photos in order to map some km of a street (i need a little of accourancy on asphalt, bump, banking, not the sorrounding environment). I want to reproduce a street near here in a racing simulator.
I thougt about a timelapse with a GoPro camera, bu i’m not sure about barrel distortion of the lens and the shooting angle.
Hi,
to map a whole street I would use an UAV (Unmanned Aerial Vehicle) to take pictures. The best option would be a RC quadcopter (there are some great open hardware projects too!). Here you can get some information about the drones we (Arc-Team) build:
Regarding the camera, the GoPro would be a good option (you can read about it in some of the post I gave you). Do not worry too much about lens distorsion, if you will use PPT, or any similar software, building the 3D model the pictures will be undistorted.
Ciao
Ciao!
Thank you for suggestions. At the moment I have no access to an UAV and since the project is not of primary importance, I’m not going to take one just for this.
I was referring to something similar to this work http://arc-team-open-research.blogspot.it/2013/03/sfm-for-underground-documentation.html with ground level shooting. Any suggestion about shooting strategy?
Is it better to shoot in front or looking to the side for example?
Thank you!
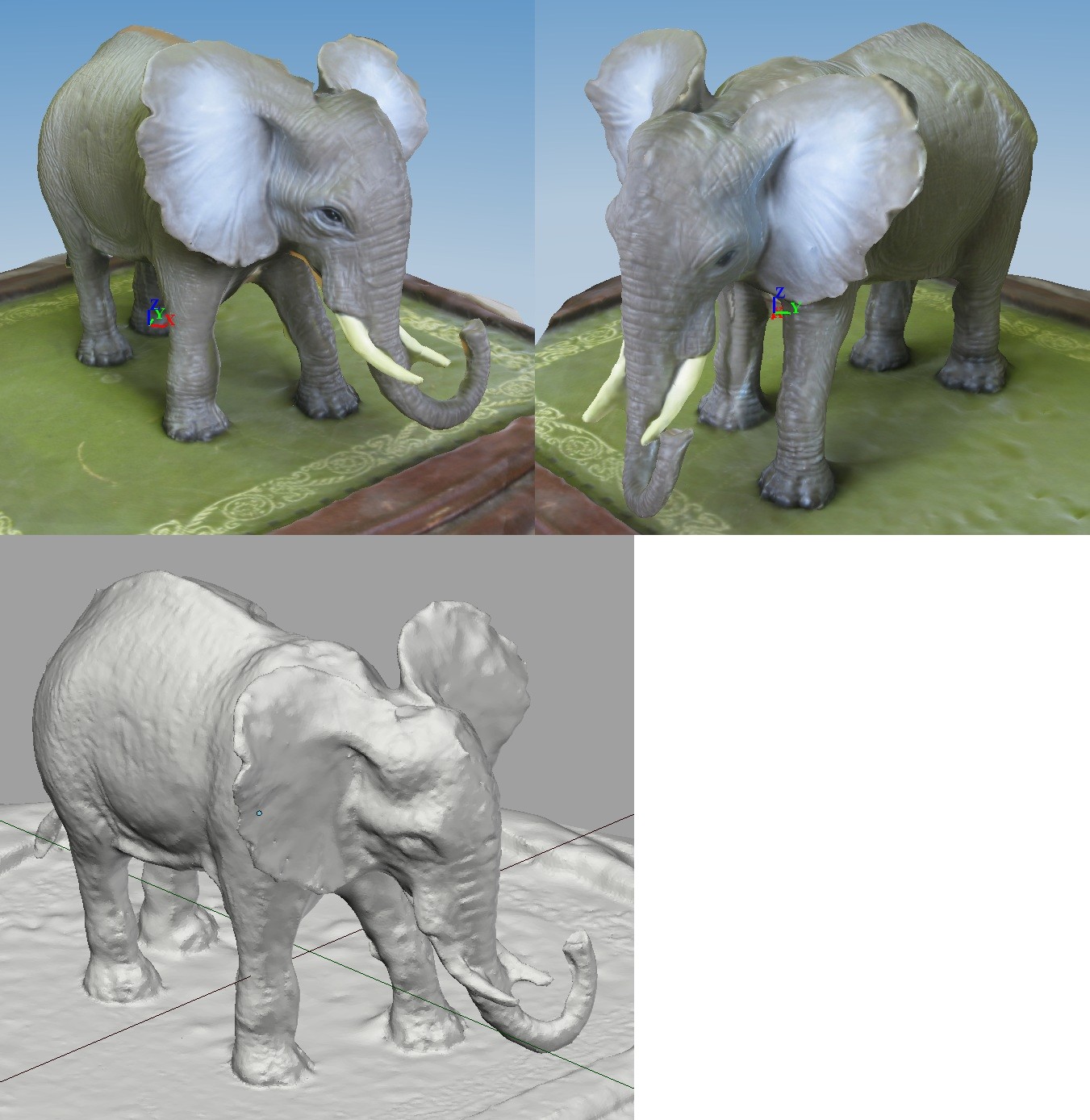
Some really nice results!
I toyed with it too.Also i toyed with Agisoft ‘StereoScan’ yes StereoScan not PhotoScan ! Stereo Scan is free and very limited but I used 2 photos at a time and then aligned them all in meshlab.Results with PPT , StereoScan.
Snapshot02 Agisoft StereoScan
Snapshot04 PPT Poisson Surface (Octree=12,Solver Divide=12, Sampler/node=4, offset=1)
Attachments

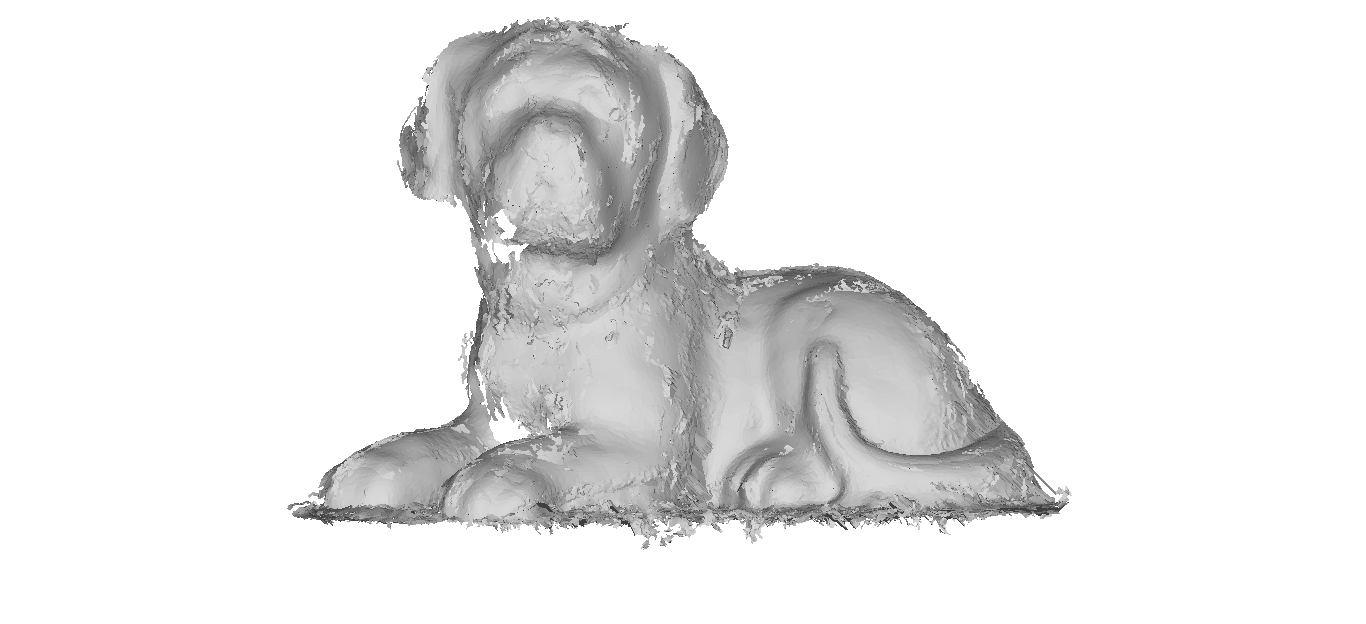
Hi, here’s my attempt. I used 133 photos.
Few new things I have noticed!
One. You can improve your results by making a minor improvement in osmbundler/init.py by changing line no. 262 to
photoHandle.save(outputFileNameJpg, quality=100)
from
photoHandle.save(outputFileNameJpg)
BY doing this JPEG compression artifacts will be minimal and better image will lead to better point cloud! Now even if you keep scale 1 still it introduces artifacts. So do try this trick and post results.
Another thing i did is to use masking to block out irrelevant stuff. I simply blacked out the background and it worked!
So it means you can use turntable too if you rotate the lightsource with it ( if it is too non uniform ) and…just shoot subject infront of a uniform colored screen without pattern or you know mask it in post processing.