Greetings.
I am currently working on a split screen shooter game that is very basic and is more of a proof of concept game than one that is actually meant to be played.
I have been messing with using a joystick to control one player, and the mouse and keyboard to control the other.
My issue lies in the fact that it is incredibly difficult to use the joystick.
I found that the most issues are in aiming (using the right axis). Because I’m using a mouse input for player 1, player 2 cannot be simulated with a mouse, therefore the right axis simulates pressing the arrow keys and the arrow keys control the rotational motion. The issue with this is that, unlike with a mouse, the rotation is a set speed that occurs immediately.
To be a little more specific, with a mouse you can inch the mouse very slightly to right to look very slightly to the right. However with my joystick system you go a full increment of rotation to the right if you barely push the stick over.
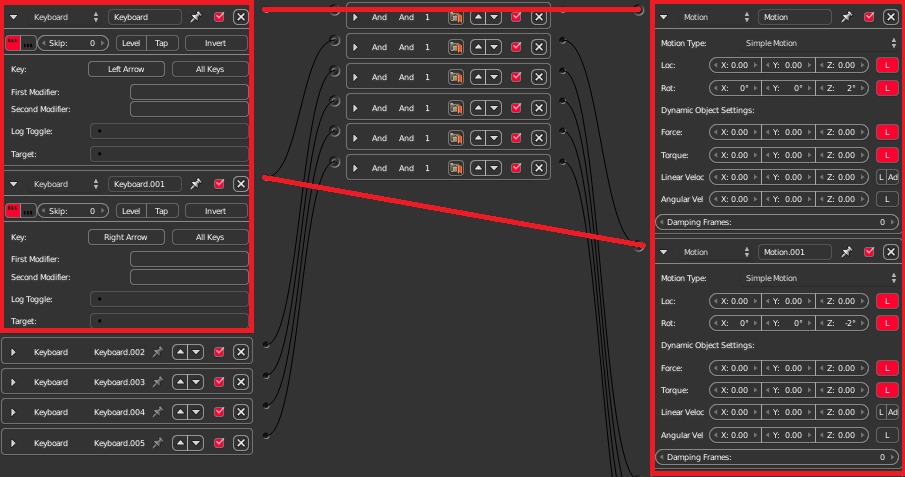
This is the in game logic. The left arrow key rotates the player 2 degrees on the Z-axis, and the right arrow keys rotates the player -2 degrees on the Z-axis.
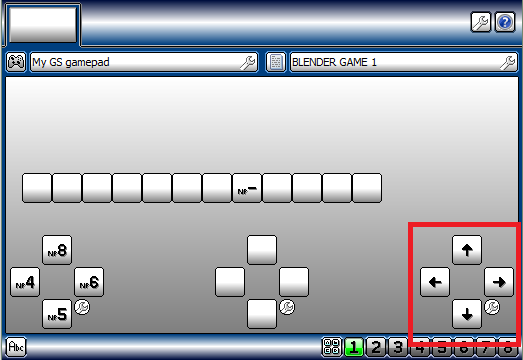
This is the program that maps the controller to my computer. The boxed area represents the right axis. Up on the right axis is mapped to the up arrow, left on the axis is mapped to the left arrow, etc.
So when I barely move the right stick the player rotates a full 2 degrees (or -2 degrees), making it incredibly difficult to aim. I could lower the degrees that it rotates by, but that would lower the overall sensitivity and although making aiming easier, it would take ages just to do a 180.
I tried messing with torque, however with the torque setting the player STARTS to spin correctly, however the player will continue to rotate after you release the key.
I’m not experienced with python whatsoever, I work with logic whenever I can. But I’m not opposed to using it if necessary, however I’ll need a little more help in understanding it.
I’m not sure I worded that very well but that’s the best way I can describe it. If anyone can provide assistance, I’d be eternally grateful.
Thanks in advance.