Here is my first walk cycle… please critique so I can change it as needed!
This is really good, you gave a mechanical touch to your walkcycle and the weight of the character is depicted well.
Very nice, Like the strut
Good, but I noticed the main body of the character stays rigid, you could twist it slightly with the legs like our hips do. You could also tilt it down along with the legs to get some more motion in there. If you were to film reference footage of you walking, you would notice your hips move along with your thighs.
Weird thing, his feet jump to the contact positions very quickly, which is distracting. Try to cushion it a little.
Sorry if that’s too much, but I’m always looking for everything, so here ya go. 
No no, I need all the advice I can get! As far as bending the body, it’s all one peice, so I would have to remodel, and because of the way the hip joint is built AND the fact that this is all mechanical, I don’t know that it’s necessary. The feet are another story though… I knew there was something jumpy about the overall cycle, but I couldn’t put my finger on it… but you got it right on! The problem is that I’m trying to show his weight by keeping his feet moving fast while in the air, but slow while on the ground, so I don’t want to slow that transition too much. The toes spread out when it puts weight on them, so that helps too; I’ll slow down that transition a little bit. The other thing I don’t like is how long it’s feet are angled downwards, so I’ll make some revisions today and re-upload it, hopefully it will look better!
sounds good! But another piece of advice? Maybe when practicing walk cycles you could use a bit more flexible rig. Maybe try the mechanical character later when you’ve gotten better. I suggest using ManCandy, or (I don’t mean to advertise), my rig in my signature? It’s not really that I’m biased on my rig, but I made it specifically for body mechanics. It’s very simple, and it’s great for the early animating stage.
looking forward to that update!
Here is an improved, longer video of the walk cycle. Overall it looks smoother, but I’m using linear interpolation as opposed to bezier. With smooth curves, the feet slide a little at the end. Should a stay away from linear, or is okay in certain situations? If I adjust the ipos a little the feet push through the ground a little bit, so I don’t know if I want to go that route.
Anyway, regarding the video that is posted, do the feet lift off the ground a little fast, or is it just me?
Oh yea… is it better to post videos on youTube or Vimeo?
Thanks for all your help so far!
please post on Vimeo, because with Youtube you cannot scrub through the video, with vimeo you can.
As with ipos, stick with bezier. Smoother ipos=smoother actions. Even a mechanical walk has smooth, arcing movements.
Looks great. The second version fixed most of the qualms i had with it. The leg movement looks good. Maybe try having the body swing with the walk slightly?
That’s what I was saying earlier- maybe have the main body rotate along with the legs, just like hips to with legs.
Leg movement still a little jumpy though. If you were on bezier interpolation, it would cushion it a little more, and would reduce the jumpiness.
Thanks for your comments/help, I just finished a 3rd animation that uses bezier interpolation. It did smooth the animation a bit more, but I had to spend some time tweaking IPOs to keep the feet moving at the same speed. Let me know what you think! I just created a Vimeo account, but I have to wait for like an hour before it is converted, so I temporarily posted the video on youTube.
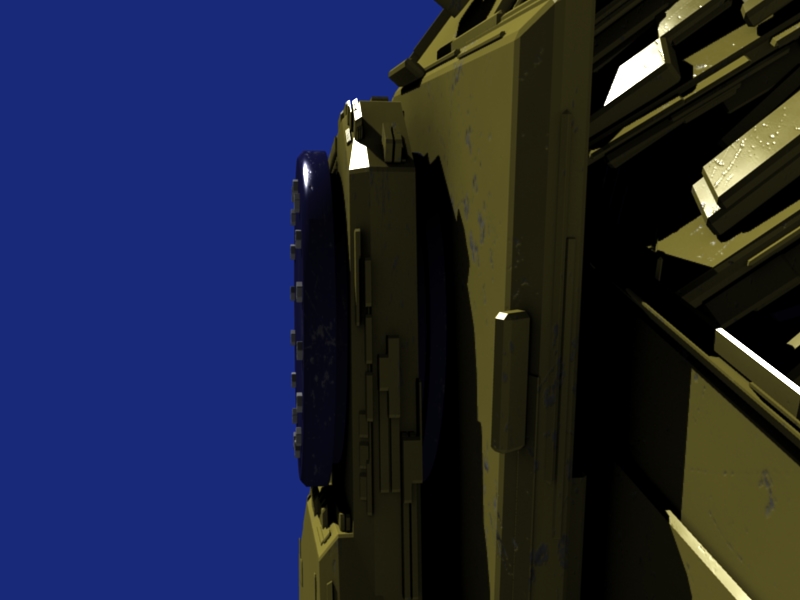
As far as swaying/twisting the hips it is virtually impossible with the kind of joint I have at the hips… look at the attached image and you’ll see what I mean. It’s a joint that allows rotation on one axis and nothing else. If this was a living character I would say that hip movement was essential, but with a mechanical robot I don’t think it’s necessary. Let me know if you strongly disagree, but I don’t think it’s that important to remodel the joint and rework the rig just to make a robot swing its hips!
Attachments
Well, like I said. Just use a more flexible rig and it will be easier to learn, plus you learn more.
Pretty soon I’ll build a humanistic character with a very flexible rig and try to build some animating skills with that.
Here’s the link to the video on Vimeo
Is there anything that should be done with the legs yet? At think point I think it looks ok, but my vote doesn’t count…
Legs are still a bit jumpy when they pick up off the ground.
now THAT is much better. Good job!
Thanks, now what about making it turn… the out foot moves to slow and the inner foot moves too fast. Do you have any advice about this? If the path doesn’t curve much, it looks fine, but for those situations when you need a sharp turn, it creates a problem.
I need to see what you’re talking about; I don’t understand exactly what you mean.
Alright, I’ll render an animation tommorrow and post it so you can see what I’m talking about.
Alright, I rendered the problem and posted it here on youTube for time’s sake… you’ll see what I mean about the feet slipping right away. I don’t know if there is an easy fix for this or not, any advice would be great!