I was hoping to get critique and suggestions. Any thoughts, guys? This is my first extensive modelling project, and my first attempt to make an epic realistic character.
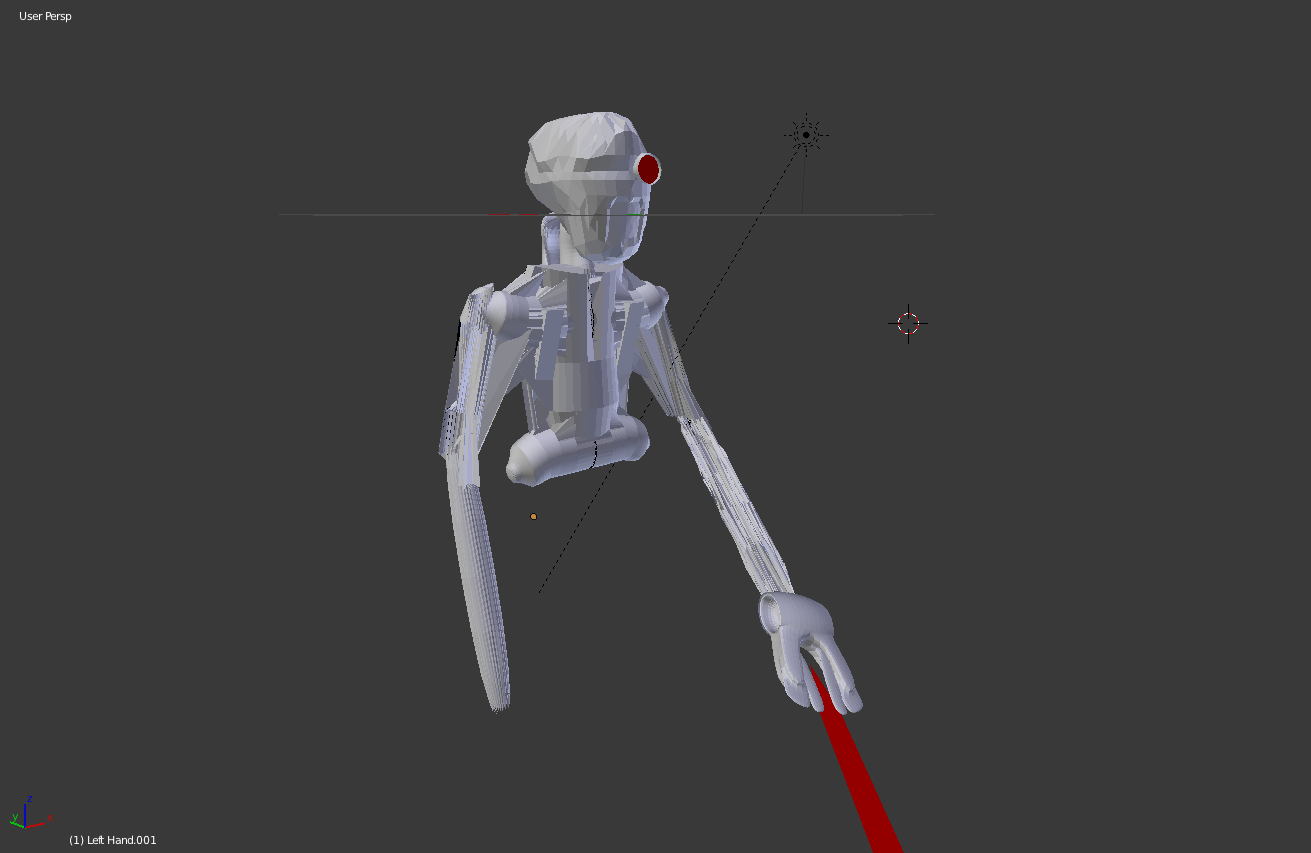
Yeah I think the head looks good with top down lighting, but the topology is pretty f’d right there. That’s an easy thing to fix though. Oh bro, you got some crazy shit goin on with ur arms. You need to post ur .blend for any further help. IMO I think you tried to model that guy in a single go in edit mode. That robot should be made up of lots of separate objects parented to each other and then, to make ur life easier, you should add some motion constraints.
Don’t get discouraged though. Sucks when you upload something you put time into and everyone poops on it. lol Just keep refining and it will get better. The world needs more assassin robots that’s for sure.
Neh don’t wait IRE. Ur doing fine. Even the pros post work and get ppl telling them its wrong. Motion constraints are more for animating. They keep arms from bending past natural limits. Stuff like that. You can constrain the movement of anything along an axi or along a path or w/e. You don’t need them if you aren’t animating really. I would really love to know what caused all that tearing and crap on the arm. I’m sure it was something easily fixable.
You can’t expect to become a pro overnight. The only way you’ll ever get better is by never giving up. Do you have dropbox? If not here’s a link. https://db.tt/X1wEkRQ8 Use that and get an extra 500MB of space. Upload ur .blend file to that and then get a link from the site that you can share here. Then ppl can download your .blend file and see where you might have made a mistake and help you to figure it out. I’m sure ur a bit sick of this robot at this point, but stick with it and you’ll learn a ton. Your next robot will be 1000x better.
If its a small blend file you can use this: http://www.pasteall.org/blend/ It’s a little quicker if you dont already have a dropbox setup. Would also be interested in seeing the .blend file.