Ok first off, there is the light version, which will be for the people who could walk, but are to weak, (they can still move, just not well) it will use pressing against the http://en.wikipedia.org/wiki/Pressure_sensor to “scale” there output based on a weekly or even daily measurement of patient strength, so a week leg gets help, not a healthy one beyond not carrying any extra weight the system ads to that leg,
this system will use basically very strong bike break cables -Src-1- http://www.pasteall.org/pic/46077
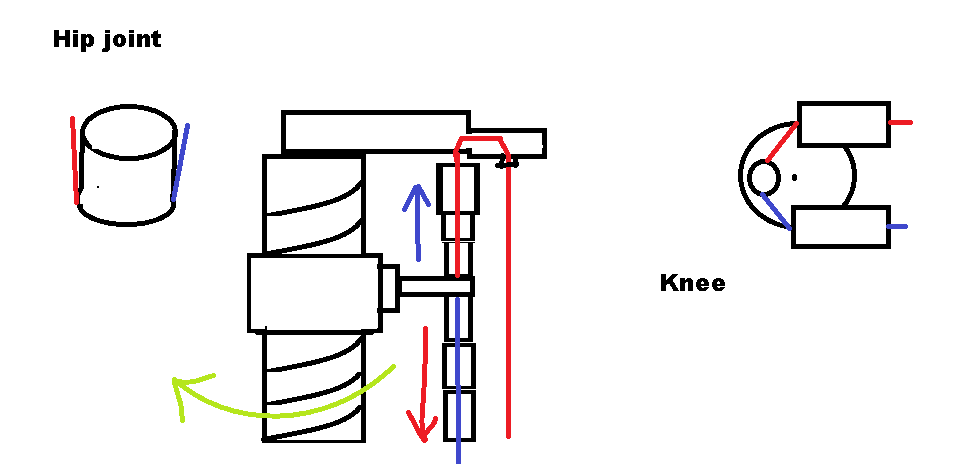
that are linked to individual servos in a back pack, with 2 large lithium Ion 12 volt batteries,
these connect to each joint, think about making it in a game, then draw it…
I will have a concept model, top it, tinker help me change it,
but basically any small muscle needs a equivalent servo
the idea is mine originally ,
it’s our idea now…
it’s not my project
it is our project
where do you think we should go first?
the "total"version for people who can not even move there legs, will use a radar, sonar, progressive laser scanner array etc,
this will map a real time displacement mesh that exists in the game engine, this would then be used to position the next step, based on walking patterns,
I will test the system on me, or anyone else willing to test it near where it gets rep-rap printed or cast etc,
I don’t want to test it on the handy-capped… initially (I would rather hurt me)
I am in need of help,
fear the toy maker, because he makes pretty things, that do things people do not understand,
Game makers are the next world hackers,
src-https://www.google.com/url?sa=i&rct=j&q=&esrc=s&source=images&cd=&cad=rja&docid=tcT5QDGHPn5CfM&tbnid=Arbo3OKOA7wKWM:&ved=0CAUQjRw&url=http%3A%2F%2Fcommons.wikimedia.org%2Fwiki%2FFile%3AUniversal_Brake_Cable_Ends_2.jpg&ei=aDcrUeStJoLI9gSpxIG4DQ&bvm=bv.42768644,d.eWU&psig=AFQjCNEzeL2VzqE8OKZgL_7JxtMy-SFIAg&ust=1361873125838388

{kind=link}