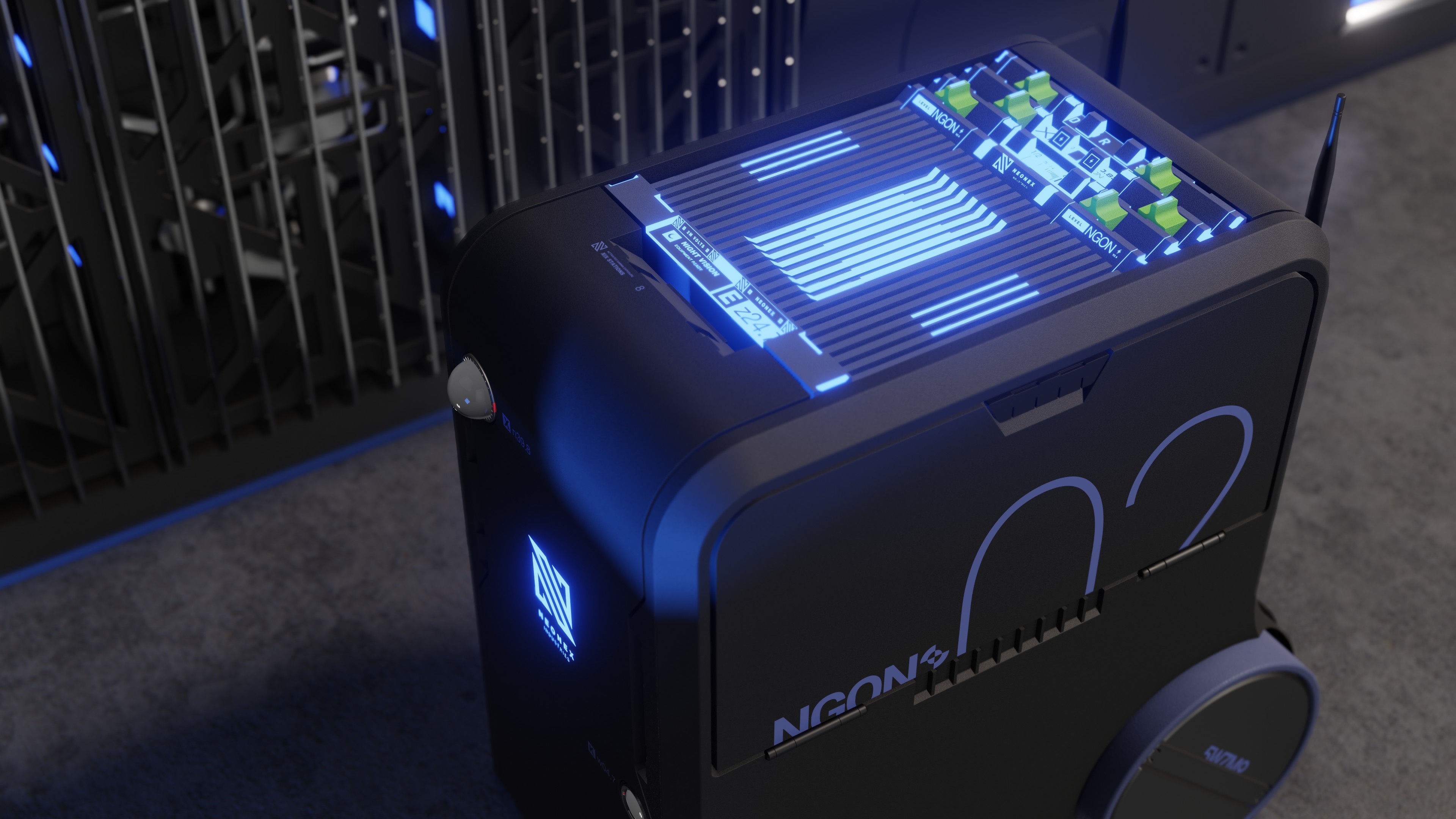
This is a quick study I did using the non-destructive power of Blender. I really like the ability to be able to continually refine a design, and it’s so easy with Blender’s modifiers. I also used a lot of KIT OPS kitbashing INSERTs, most of which I created myself. It’s all part of a larger project. All decals by Sir Charles.
Pretty good work.
Though from physics point of view they seem very odd.
The centre of gravity can in no way pass through the axis of wheels, so it’s impossible for it to be balanced with current placement of wheels and remaining body.
While that’s normally the case in traditional 2 wheel gyro stabilized upright vehicles, this one is quite different. Designed for low gravity off world use, the Observbot uses a liquid stabilizer called the Heinberg Balance Inverter, which provides the necessary torque forces to stay upright.
I don’t know all the tech, but I have seen it work quite nicely during my last deployment to the Saturn moon Enceladus.
As an engineer (working for about 7 years plus some 6 of school) the only advantages i see in having 2x wheels in a corner without a support forward/central are:
achievement in manufacturing
me as Maintenance I do not bend to floor level to reset the RAM of the robot. The robot will pivot at 90* making it easier for me to see, change, extract, debug, gen serial number, charge etc
Great work and great idea -> really wish is a good AI on that little robot!
I know this is not focused critique but the data-center robot to the left of the image lacks a bit o realism on placement. Is not really looking like is really present on the floor, unlike the robot on the right side that casts a better shadow and has more presence.
Just a thought.