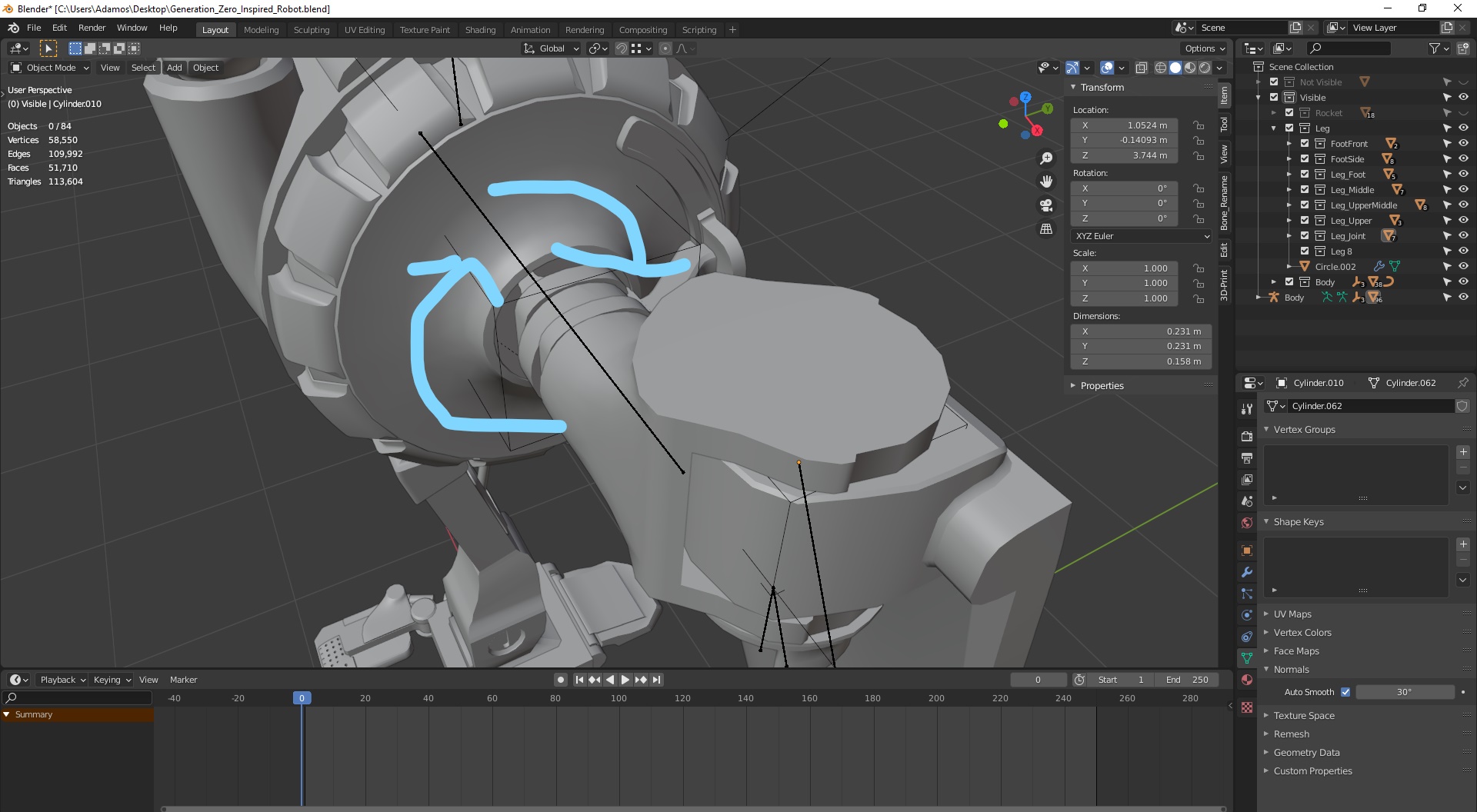
I wanted to rig this cool hard surface model I made And I ran into some issues. Because I made questionable design choices in the modelling it is hard for me to rig IK constraints:
So basicallly I want the joint to rotate around a different origin on the X axis and I want a different orgin point when I rotate around the Z axis.
And I also wanna make the whole system compatible with the ik cosntraint which is atl the way on the foot/ankle.
I dont know how I would get this effect without using too many constraints.
I have provided a file below be aware its a kind of a mess I will refine the naming and everything after the fact.
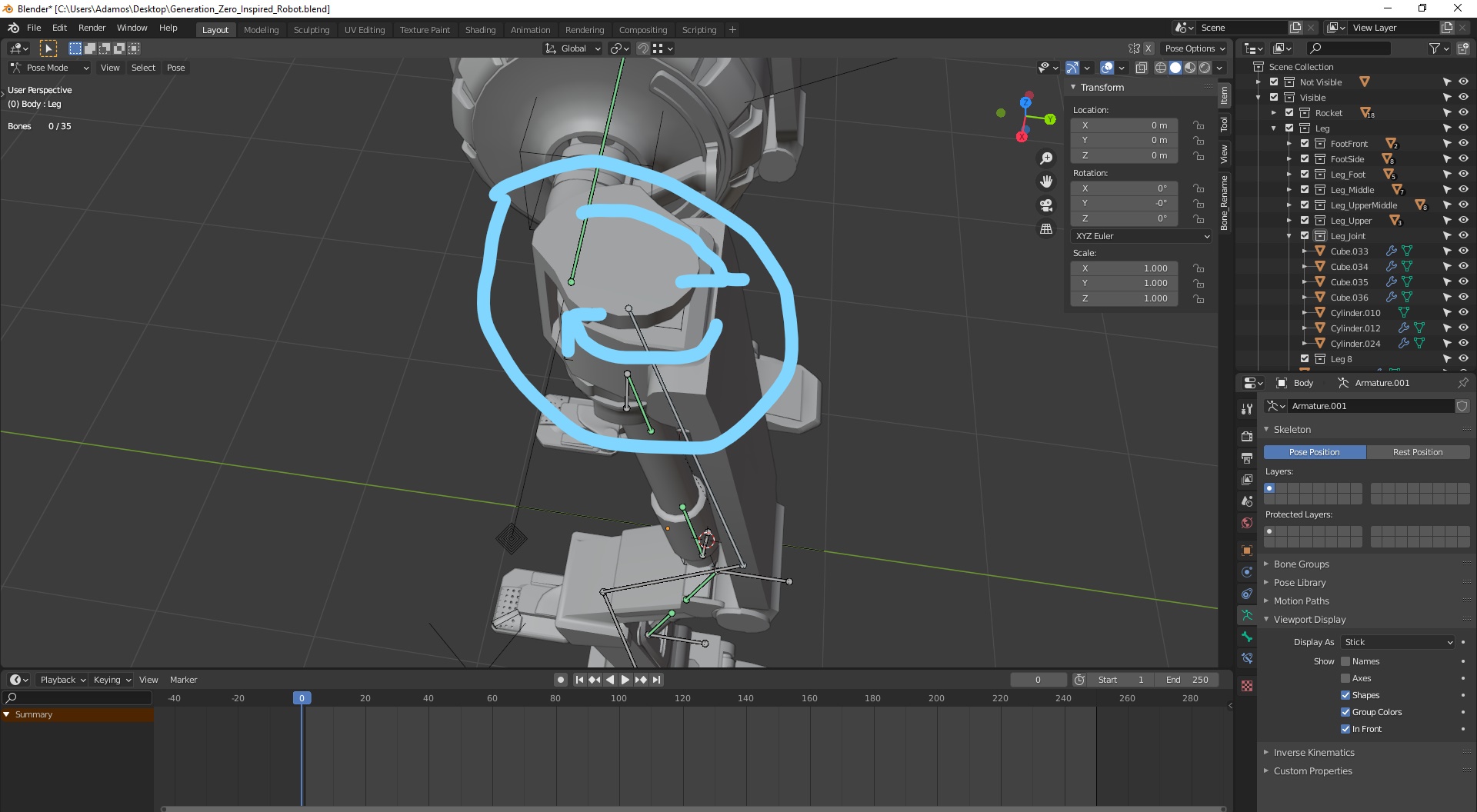
in every bone properties you have an inverse kinematics tab, you can lock any axis you want. and you can make some bones stiffer on some axis if you prefer your rig to use one bone or another to do the pose you want. you’ll basically need to make an intermediary bone to connect your first joint to the rest of the leg. then this intermediary bone, you can lock all of it’s axis it’s just a way to have the next pivot point where you need it to be.
though I tried it on your model and while it perfectly works the solutions your design allows for certain positions is very jumpy. you should try to have at least one spheric joint in your design. that will help a lot. plus, in your current design, it’s actually impossible to have the foot flat on the ground in every positions.
oh and by the way you never EVER use the tip bone to control your Ik, you need a separate target outside of the hierarchy
Alrighty will definetly add this to my list of things to do on the model. And also can you clarify what did you mean by: it’s actually impossible to have the foot flat on the ground in every positions.
your ankle has only one rotation axis. so you’ll figure out that if you want to respect your design’s intentions, your foot isn’t functional. but you’ll figure this out by yourself and come up with new ideas
maybe a three axis joint. actually, you do what you want, all you have to know is that possibly the further you are from a “regular IK”, the more chances you have that it behaves weirdly. so if you meet some behaviour weirdness, the best solution is it bring it a little bit more towards a regular IK, until it looks and behave good.