Hi Bandage,
Say thanks a59303 … I check your link and found that it recommend to do the following which I did
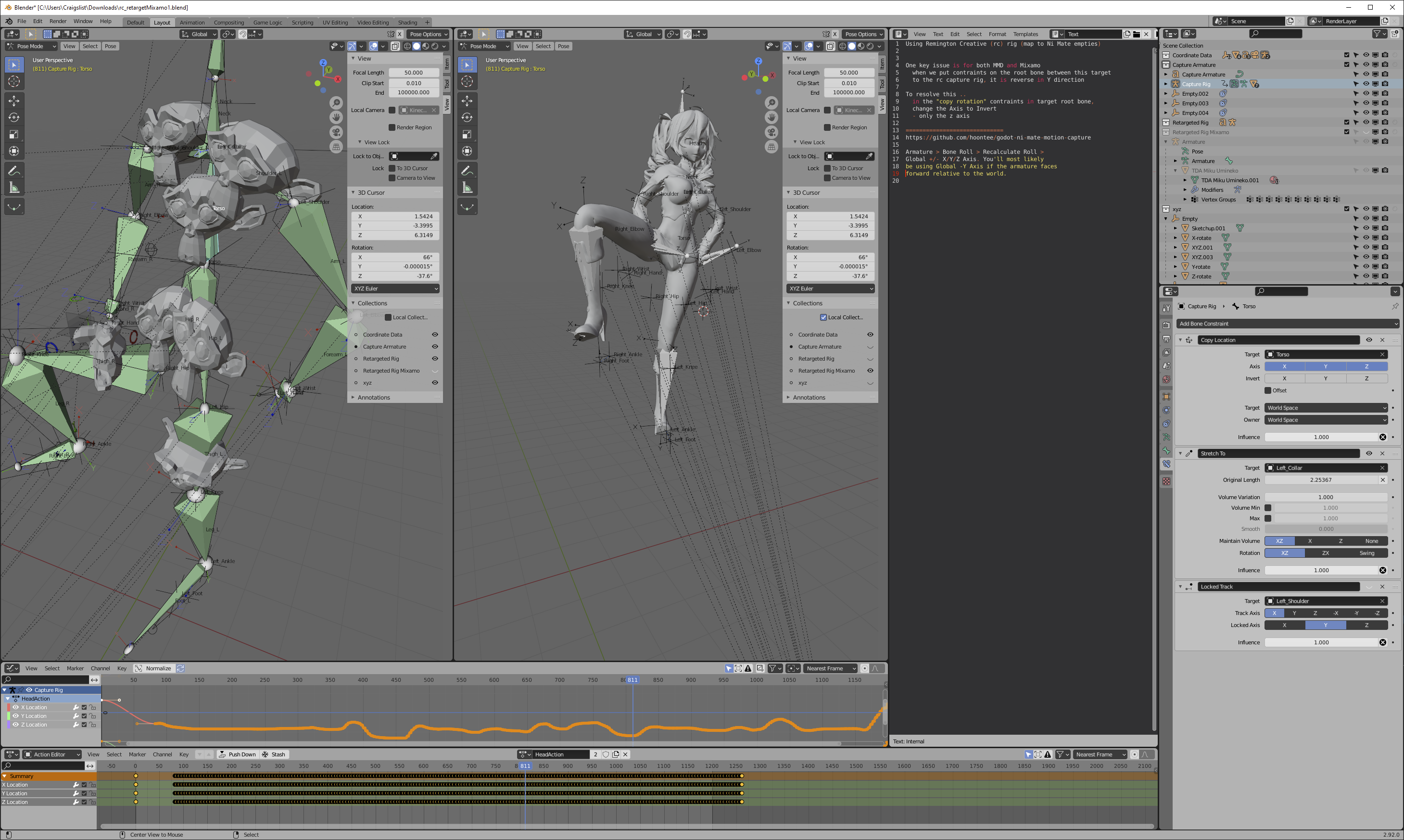
Armature > Bone Roll > Recalculate Roll > Global +/- X/Y/Z Axis. using Global -Y Axis if the armature faces forward relative to the world ; same as my problem.
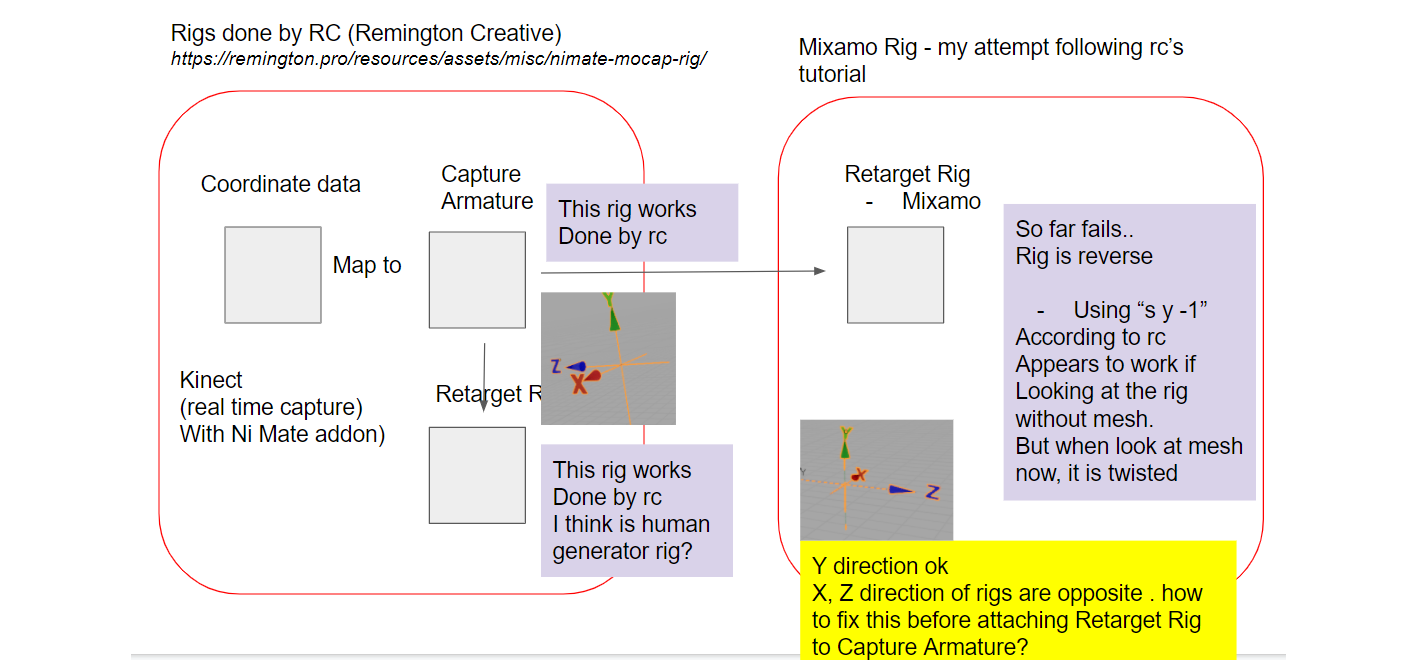
The results is same as recommended by rc with “Edit mode>S Y -1” in solving the alignment.
Bandage, sorry if I did not provide sufficient info. for you to test and I also realise you needed the animation data from Kinect to simulate the problem I am encountering. To reconfirm, my requirement is
“… capture animation from a Kinect onto the rig, and the Mixamo rig is just in the file to show that it’s possible”
What I did now in the latest test file is to have Kinect animation captured into the “Capture Rig” and record/stored it into this Blender file so you can run it. Just click “play”.
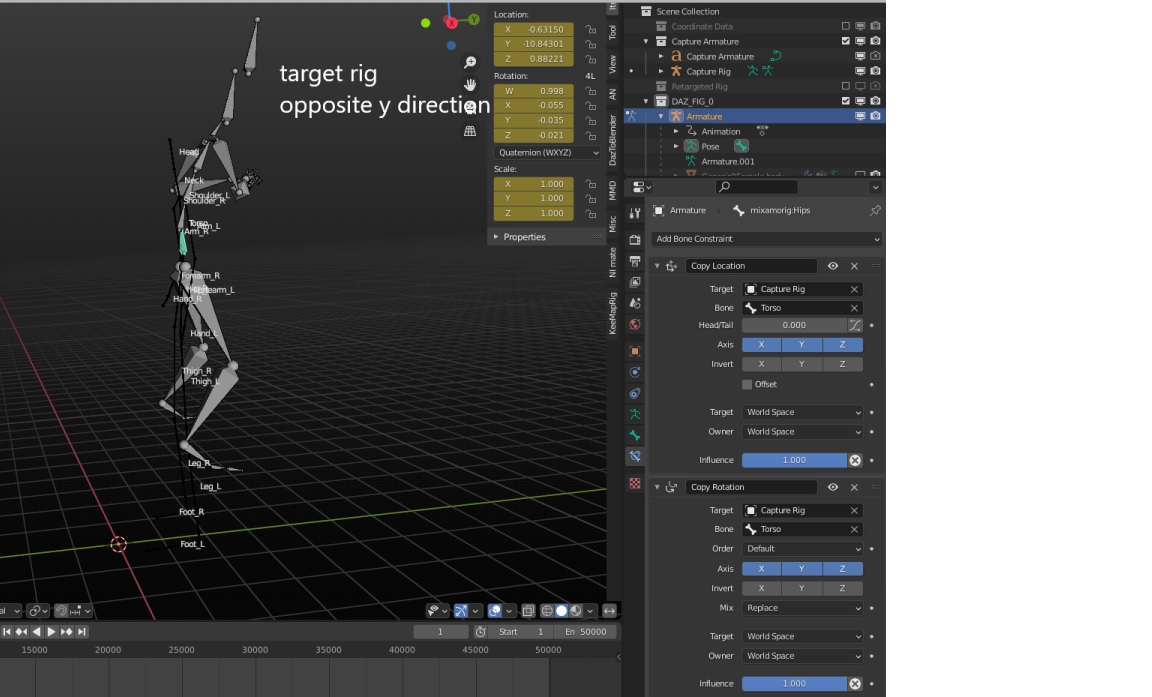
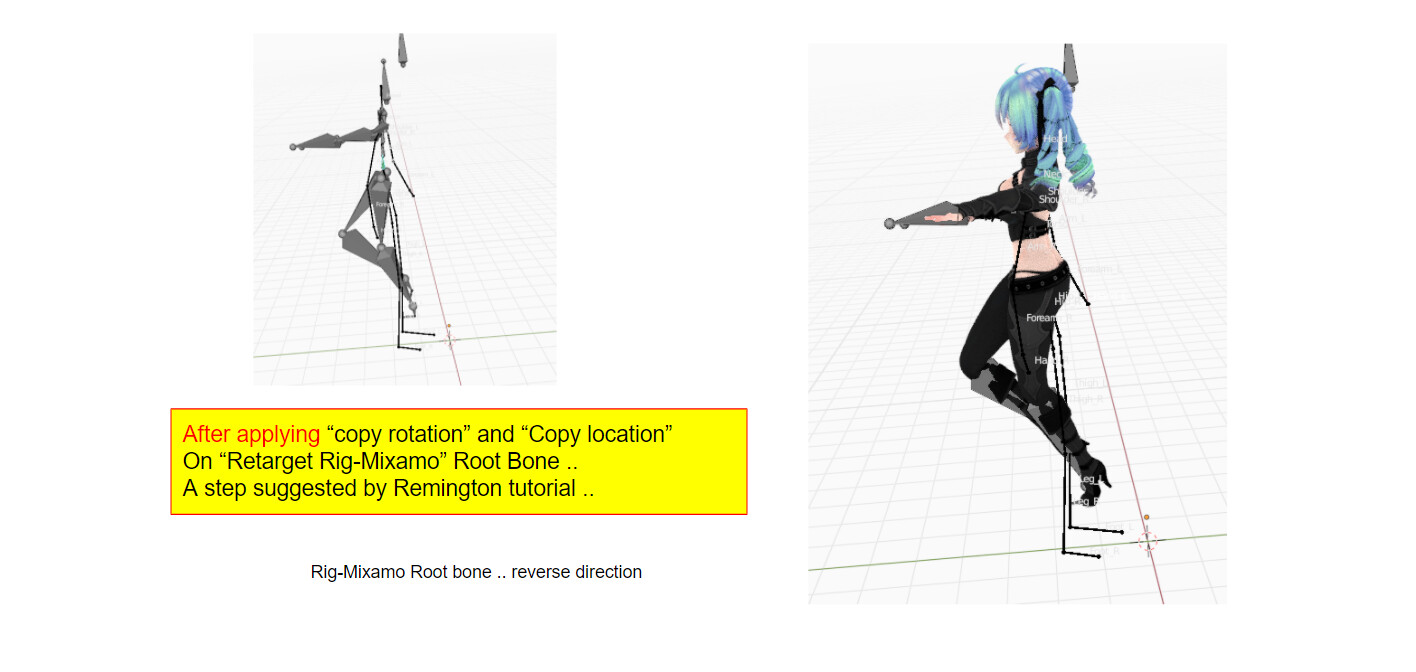
Note that I have also “link” my “mixamo rig” to this “capture armature” using the root bone with “copy rotation” and “copy location”. But before I do so, instead of using “Edit Mode>S Y -1” … I follow the recommendation in the link provided by “a59303” stated in above paragraph.
Here’s the update file with animation data already captured from Kinect using the “capture rig”.
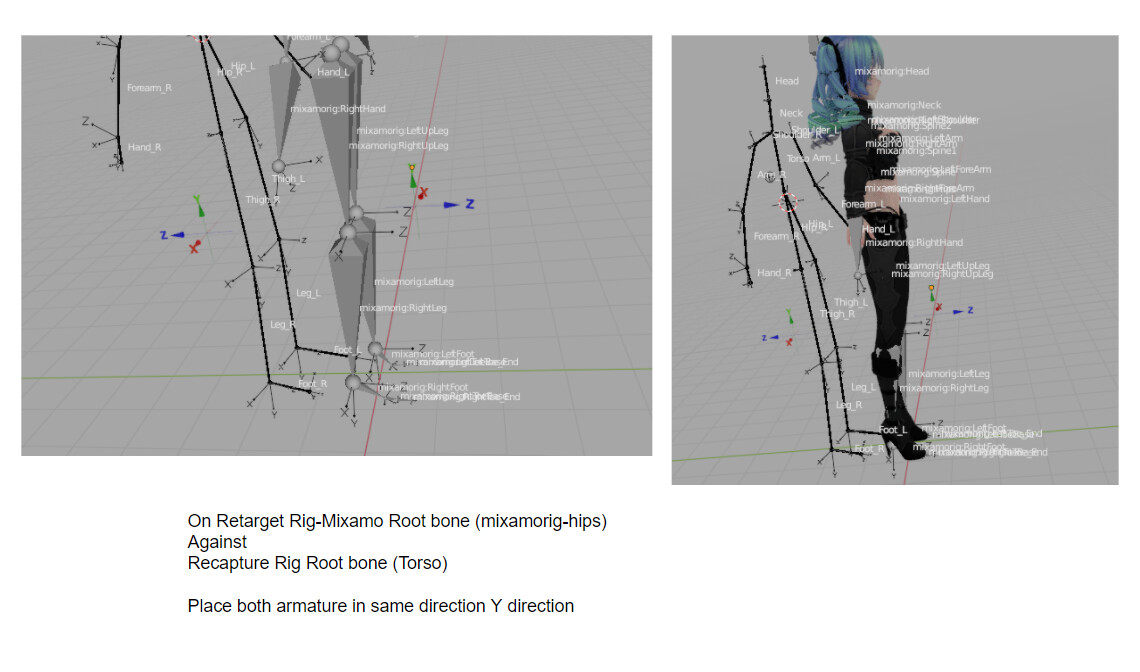
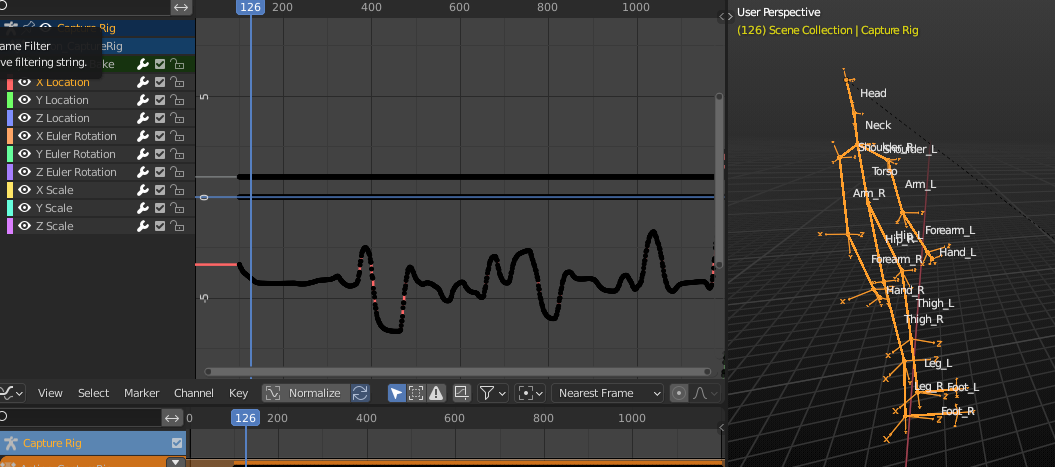
When you click play, you will notice that both armatures (capture rig and my armature) appears to align if you just look at the rig themselves, on the animation …
However, if you “display” the mesh … “TDA Miku Umineko” attached to my “armature”, you will see the problem of “twisted mesh” of “TDA Miku Umineko”.
I hope you can trouble shoot and advise what I need to do to fix this.
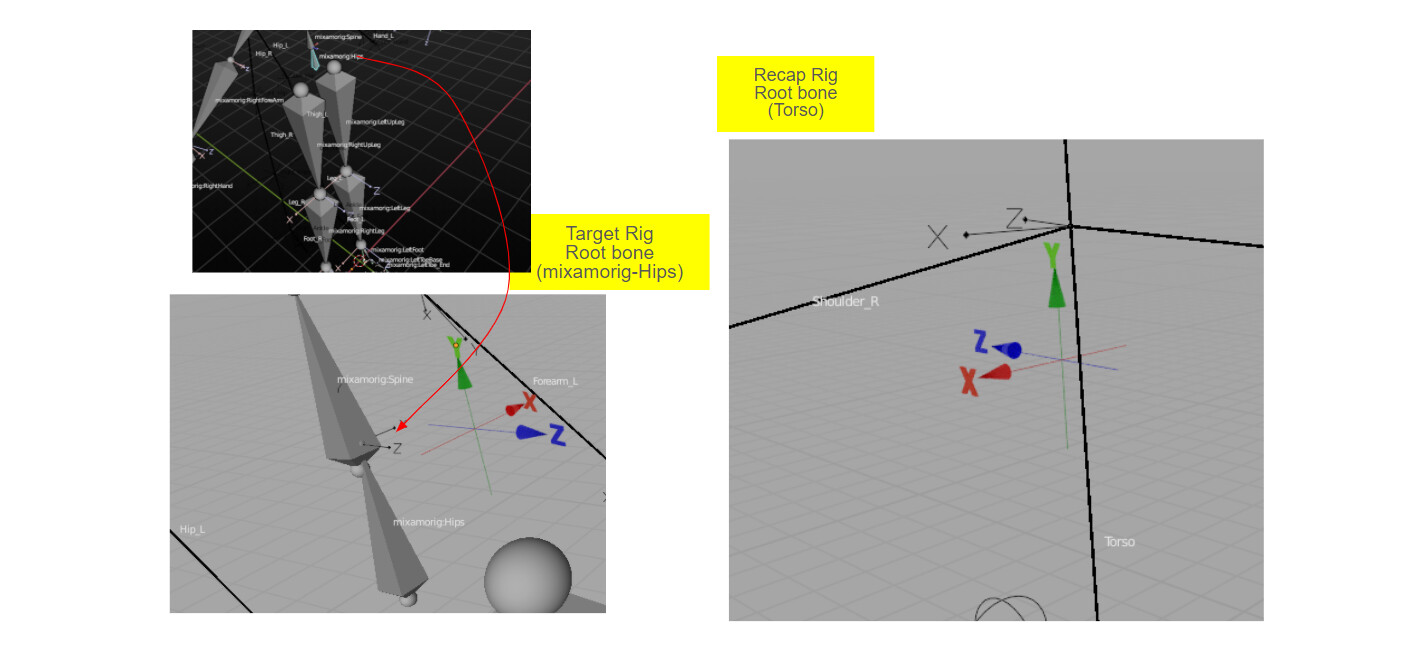
I suspect something to do with the "XYZ’ axis that was aligned in the first place as shown in my previous message/diagram above, where Y is align but both X, Z are not in the same directions for both capture rig and the retarget “Armature”.
Just so you know, the “Left_Collar” bone just like the “Left Shoulder” is found in “Coordinated Data” that comes from Ni Mate into Blender (using Kinect) and that set of bones (empties) are already map into the “capture rig”. I am simply trying to link my “armature” to this “capture rig” so that I can do “real time” animation/motion capture with Kinect/Ni Mate.
Hope you can help me out.
Cheers.