Hans, you are coming up against some of the considerations I tried to solve.
- Since I couldn’t assume any particular shape, I couldn’t assume any particular noise.
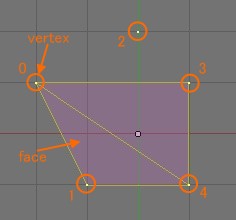
- This lead me to solve for triangles.
- Identifying triangles lead me to solve for edges, as I reasoned that faces could be asigned by CSV data on describing the edges, no?
- This identity problem lead me to naming all triangles in cloud with unique names.
- In several other forums, a brute-force algo has failed, so I assumed that finding intersecting faces would produce chaotic mesh.
- To reduce chaos, I considered divide and conquer by referencing = a single point established in the cloud to hold all triangles in relationship.
- I think that a way can be made to automate identifying by name the shared angles, so to group adjacent edges into triangles that can be faced.
- For simplicity, I assume a box model, where all faces are to the outside. This made indentations and crevices impossible, so
- I suspect all verts in a cloud must be further identified arbitrarily; I chose to use vertical layers. This would allow an orderly matrix, and therefore tables and CSV handling, no?
I apologize that I am at the limits of my abilities here. The point of my outline was to hyper-identify the point cloud, as brute force did not care about topo, but mass.