The robot was designed in Onshape by Joshua Peterson (alum of FTC team Kraken Pinion). I (Alnis Smidchens) created this promotional video using Blender’s powerful driver system to create a full simulation of the very complex geartrain. Rendered in Eevee, edited in Kdenlive.
Full description (from YouTube):
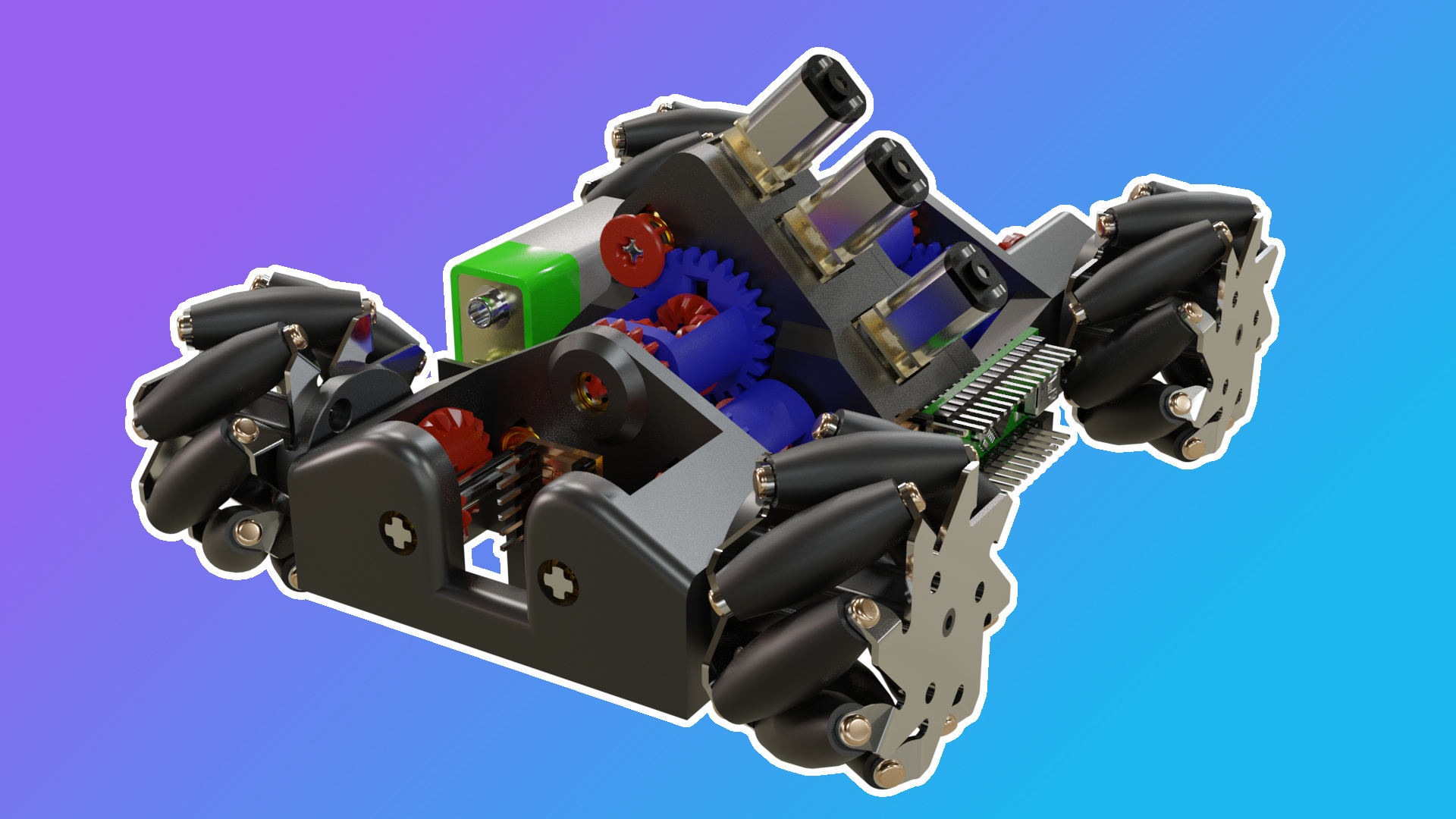
This robot controls four mecanum wheels using only three motors for full holonomic motion. How? Through 6 differentials and a complex gear-based drivetrain. Each motor controls one degree of freedom—the top motor controls rotation, the middle motor controls lateral movement, and the bottom motor controls longitudinal movement.
This video shows the fully-functioning drivetrain in action in rendered footage as well as real-world footage of the physical robot driving around with a remote control. The robot is uniquely mobile in that all three degrees of freedom are controlled using exactly three motors, unlike traditional mecanum drive bases with one motor per wheel (for a total of four motors). Thus, it can move in any direction at any time.
Interestingly, they have not very good traction because the black rollers themselves can roll (letting the robot move in any direction), and because of this rolling, they have about half of the traction of standard wheels. However, in many cases, the excellent maneuverability of these wheels (called “Mecanum” wheels) completely offsets their poor traction!
Thanks for the explanation. I’ve learned something!
I guess I thought that the angle of them would help or maybe I just assumed because they are chunky looking. Amazing in any case.
The wheels are super cool! The definitely would have better traction on soft ground if the diagonal rubber bits didn’t roll freely (it would be a sort of super tire tread). It’s very cool how many applications they have–they are used a ton in robotics in general, and there are now forklifts that use them since it’s very helpful to be able to move in any direction in a warehouse. You can take a closer look at one commercial option here to see how they are put together/how they work (there’s a good diagram showing which wheels need to run in which direction for the robot to move in a given direction): https://www.gobilda.com/3606-series-mecanum-wheel-set-bearing-supported-rollers-100mm-diameter/
Mecanum wheels are so fun to watch! We’ll hopefully be putting together a longer explanation video soon with lots of details on how it runs in each direction. In the meantime, here’s a cool video showing a forklift using this type of wheel in action: https://youtu.be/0DBXuZv38l8