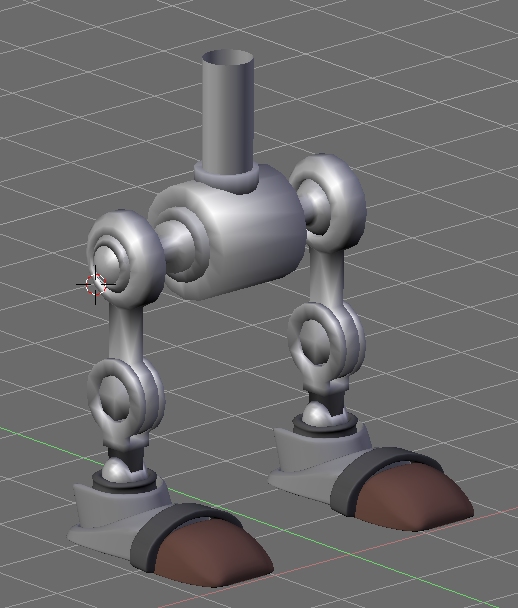
Well for the Amp project we finally settled on a design I think. I’m now working on modeling it. Here you can see the feet are modified versions of the feet on a Kurpa from ED. They are just place holders for now.

Ok, I’ve changed the hip joints so they are individual pieces and can move up and down about 5 degrees, to allow for smoother walking. And I’ve also added an arm, and the shoulders behave the same way as the hips to allow for smoother arm movement. Critique/suggestions welcome.
Attachments

His legs, though they look very robotic and stiff, with these joint setups it can get pretty good range of motion. Here is an example of his leg positioned. It is subtle but as you can see his hips being able to move will be very helpful.
PS. Ignore the shading errors cause by set smooth, I havn’t subsurfed it yet.
Attachments

He reminds me of radar from the comic “robbedoes en kwabbernoot”
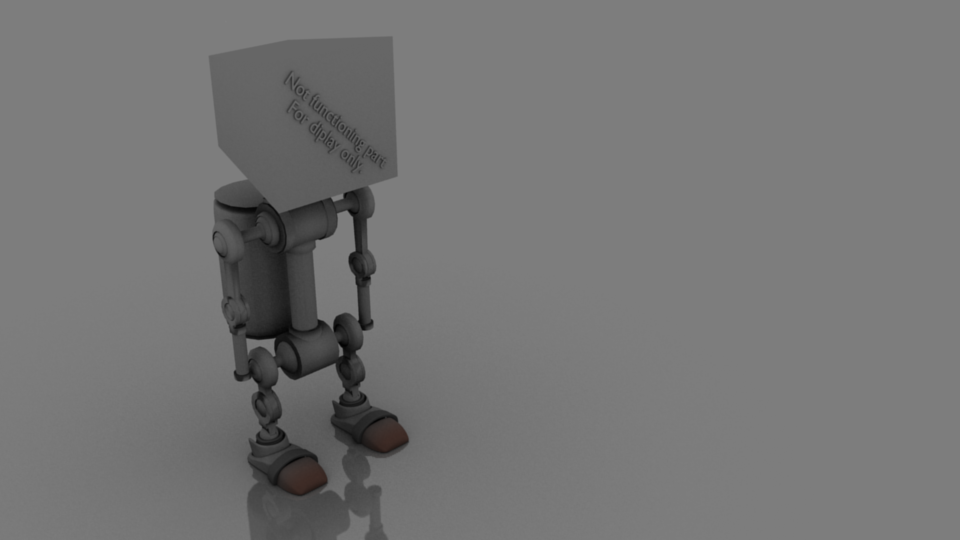
Here it is with some more changes and additions. (not final head, just a fill in to get a sense of size).
Attachments
Nice work. I like the ball joint hip thingie the best. Robots are always a challenge for me because of the lack of deformations. They need a whole different rig and design. The proportions seem quite nice to me, should make for fun animation.
