I’m trying to figure out a specific pivot for teeth rotations. Basically I have the teeth which are placed manually to fit a head with a closed mouth. Once making an open mouth version the teeth are transformed to match a specific reference. Both closed and open teeth placement is specific, so it needs to be reasonably precise.
The question is - if I have the teeth position in netrual, and the teeth position transformed, what’s the easiest method to change the pivot for the teeth so that the opened position can be a rotation instead of a translation + rotation? (if it’s even possible to match an arbitrary position with a simple rotation)
Sorry, the question wasn’t clear enough - it’s not about how to move the pivot, it’s how to figure out the correct location for the pivot, so that the transformation can be done with a single rotation. If that’s possible, that is.
Like this - I give you 2 set of teeth in 2 positions, one opened, one closed, both pivots are centered. How can you change the pivot for the closed position so that the open position can be matched with just a rotation? (again, if it’s possible at all)
Basically figuring out the pivot, but with 2 given locations for the teeth -
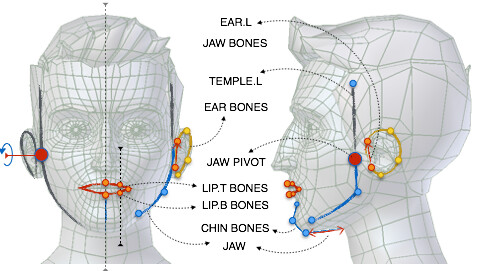
I’m not sure I understand the problem fully, but, if you parent the teeth to a rig, then you can control their rotation by controlling the bone’s rotation instead.
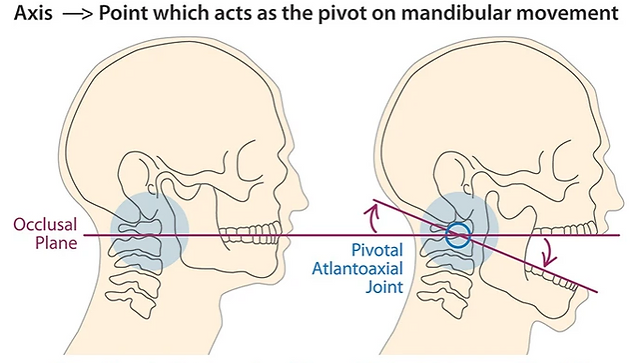
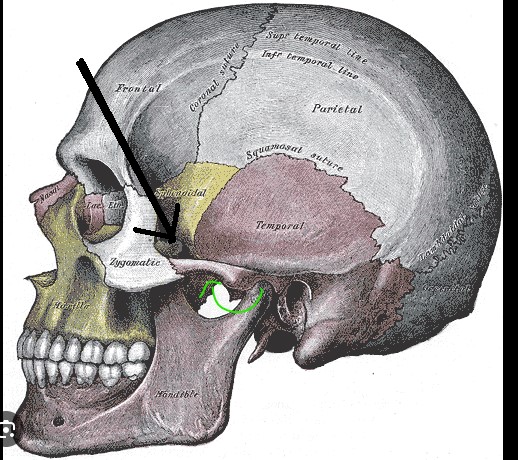
And as to where the exact pivot of the jaw is, well, you have to figure that out from the model you’ve got. The ballpark is on the tragus (a little triangle bump on the ear).
And the other things is, the jaw indeed does move or at least wiggle around for a bit. So naturally, it’s not just rotating, it’s also moving.
Yes, basically the position for the teeth are given, matching stabilized scans. The question was if a single rotation could be enough or if a translation would always be required (cause of the un-hinging motion of the jaw, when looking at it from an anatomical point of view)
Ideally I’d like to reverse engineer something for a rig, which seems like it needs transforms as well as rotations, but wanted to make sure that is the case and I’m not just missing something.
You can use a driver to add a transformation along a particular local axis based on the value of the rotation.
In the Drivers editor, you can adjust the amount of the movement, and even set specific values for the F-Curve keyframes.
Thanks for that. I’m using drivers quite frequently, just wasn’t sure if a really-really need transformations or if cheating a rotation pivot could save me those extra transforms. Seems not unfortunately, so transforms it is.
I know this is a bit old, but for anyone coming along in the future I thought I’d clarify this. You totally only need a pivot. That’s the way the actual jaw works, so it works in blender. Put the pivot point where the actual pivot point on the Jaw goes and put the teeth and jaw where they go and it will just work.
Thanks, it’s nice to know that the pivot point lies in line with the teeth! This is doable in a general sense as well.
Given two congruent objects, each consisting of at least two points, that have only been rotated, we can reverse engineer the pivot.
First, look at the angle between corresponding edges on the two objects. This is how much rotation occurred-- the angle. We’ll call it theta.
Now, we can imagine a circle, centered on our pivot point, although we don’t know where. If we draw a triangle from pivot to point to corresponding point, we know all three angles, because the angles at the points are equal. Since the angles of a triangle sum to 180 degrees, the angle at a point is (180-theta)/2.
Now measure the distance between two corresponding points, and we have 3 angles and a side of a triangle. We can solve for the lengths of the other sides (which are equal, they’re both radii of the circle) using trigonometry (Google “solve triangle angle side angle”.) That gives us the length of the radius.
Now we can place two spheres, of that known radius, on two corresponding points. The pivot point is where those spheres intersect.
If the object has not been only rotated, but possibly translated and/or scaled, then we can’t reverse engineer it.
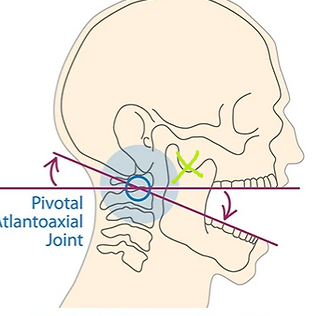
You’re correct about this, the jaw does not have a “pivot point” anatomically speaking. Side-note: what is happening in that x-ray? What is the tube going through the nose and out the mouth?