Hi, i really don’t understand the rigging in blender.
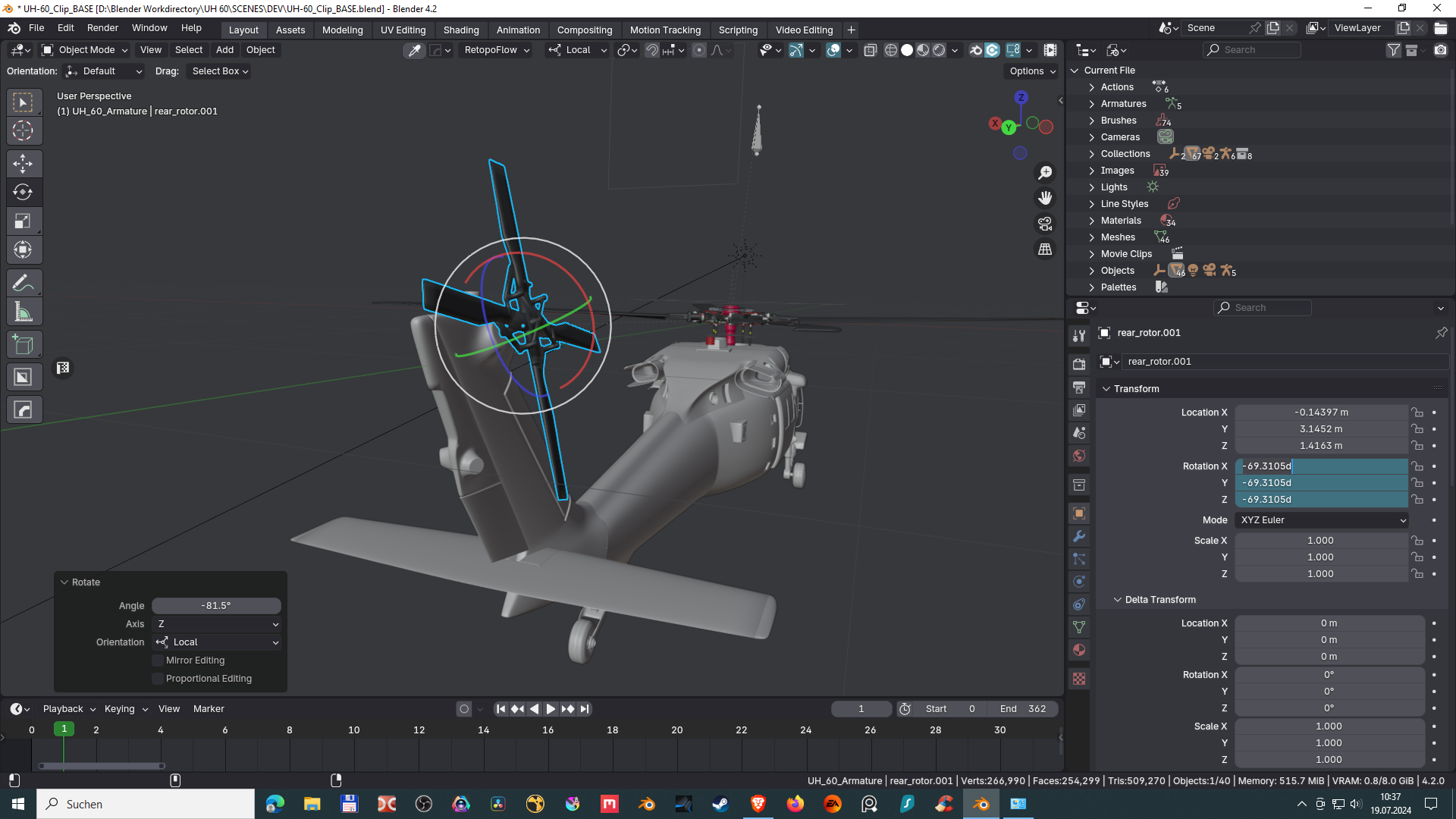
I have a tail rotor that is tilted on it’s axis.
When i rotate it on z axis with local transform in the viewport it gets rotated on all axis in the properties. I suppose that is in global transform space.
I want to use a driver and link it to the main rotor.
OK found a post that said change rotation order to to ZYX Euler. WHY ???
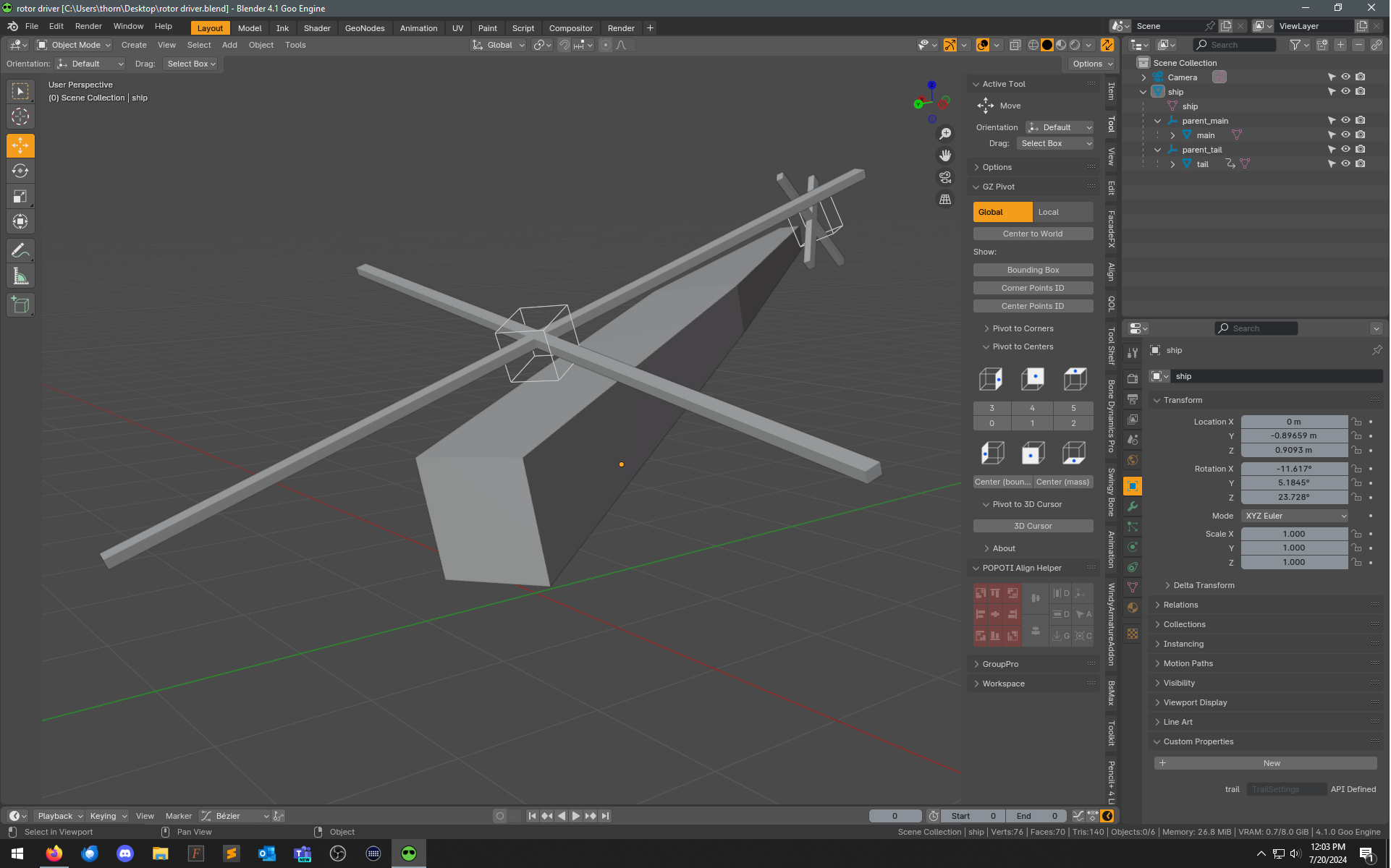
Take a look at this file. I sometimes find it beneficial to give objects that I want to rotate, a parent - so that I can tweak the overall position and rotation of this object, separate from anything inherent in a driver equation.
The driver itself is simple - the tail just takes the rotation of Main / Z and uses it for it’s own X. (Rotate the main rotor, watch the tail.)
Now, you can also rotate or move the parent objects anywhere you like - change the pitch of the main, the tail will still rotate correctly. No worries with euler order, global vs child space, etc etc.
rotor driver.zip (188.7 KB)
Thank you ! Why do some things in blender need to be so unintuitive ?