My latest project that I am very happy with.
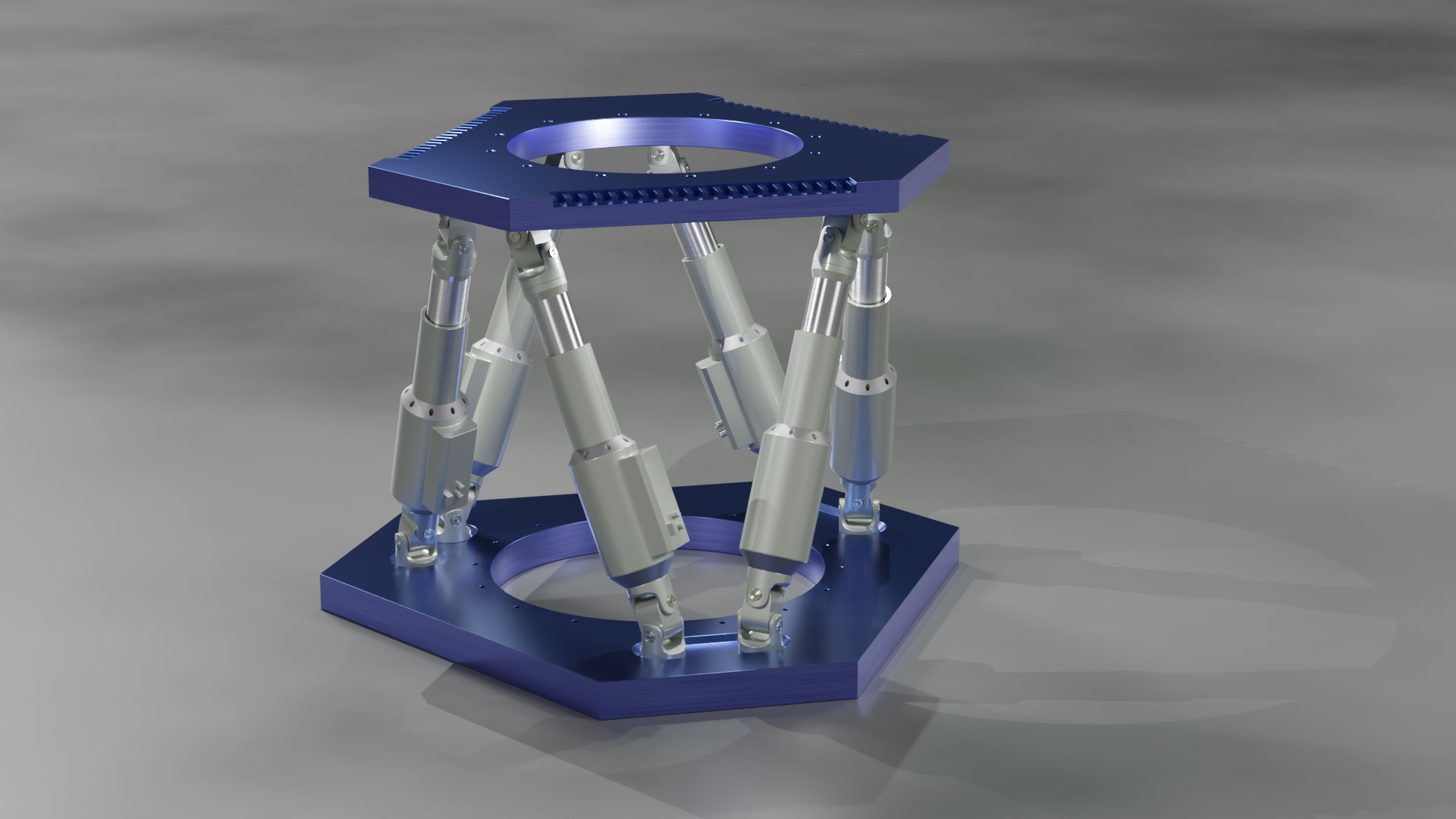
The heaxapod controller or “stewart platform” is apparently a tool used to make fine and precise adjustment in positioning in manufacturing industry or laboratory measuring.
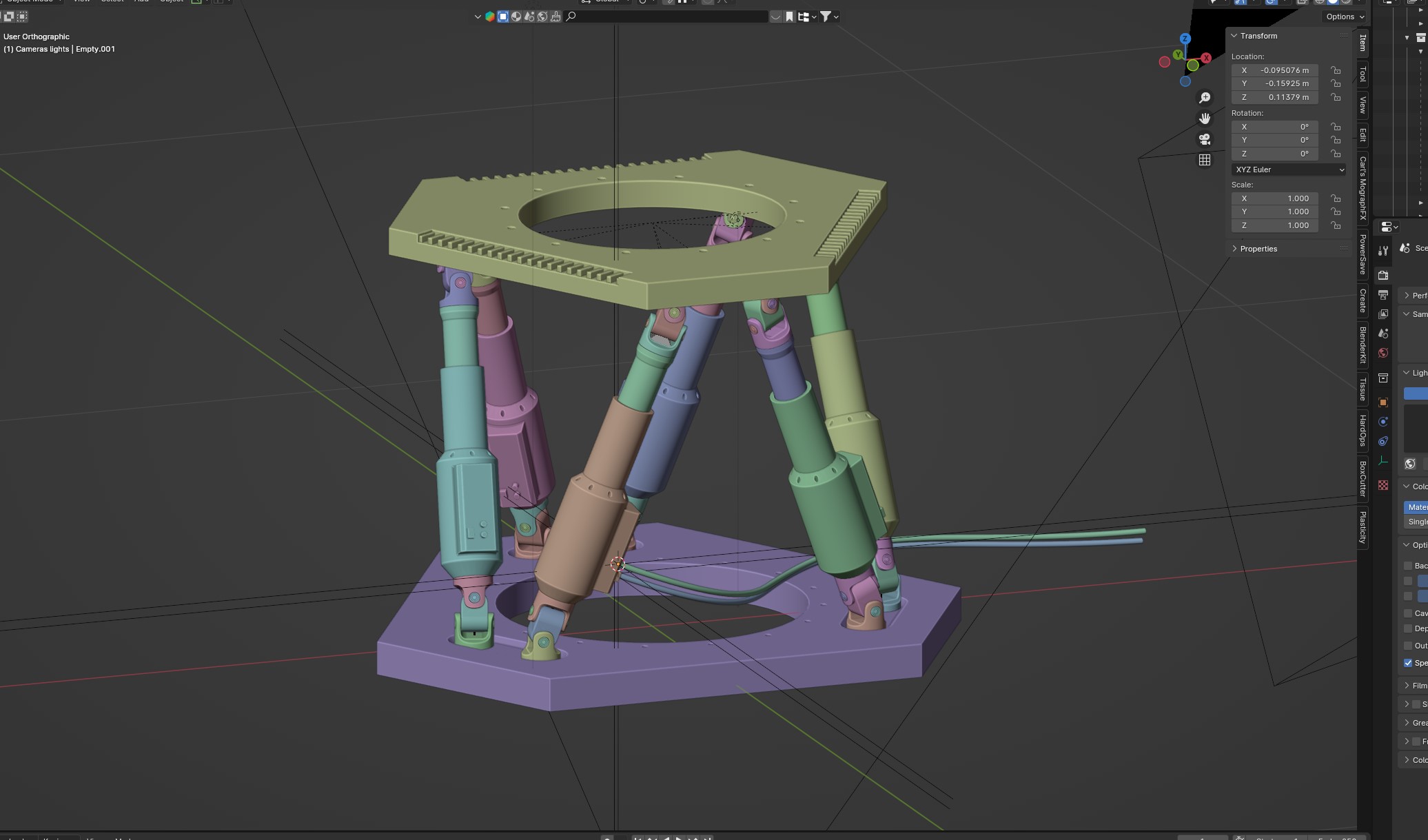
I didn´t know what it was before I built it. Just thought it looked cool and nicely symmetric. My best build and animation so far. Modelled partly in Plasticity for the heavier booleans and angle symmetries and blender for the simpler shapes.
Rendered twice after noticing the rookie mistake I had left lights on that cut into the model during animation…