Hi fellas. Newbie with Blender here. (First attempt for me making a topic here too.) I got a little rigging issue that’s probably obvious when a solution is known, but I personally just can’t seem to wrap my brain around it.
I’m rigging a robot character that has dome-shaped hands, which need to rotate around the palm rather than the wrist. I made the bones and it works fine with FK, but IK is where the issue lies:
In order to get the rotation where I wanted it, I reversed the last bone. But when I use IK, the arm bones are desperately trying to reach out to the palm, before I even move the hand bone, rather than keep the original distance. Only difference between the IK bones and the other bones is that I unparented the IK hand from the IK arm, because it was creating weird rotations when trying to move the hand. I assume that’s where the issue lies.
In Edit mode, everything looks fine.
But in pose, IK creates weird rotations on the main bones it’s constrained to.
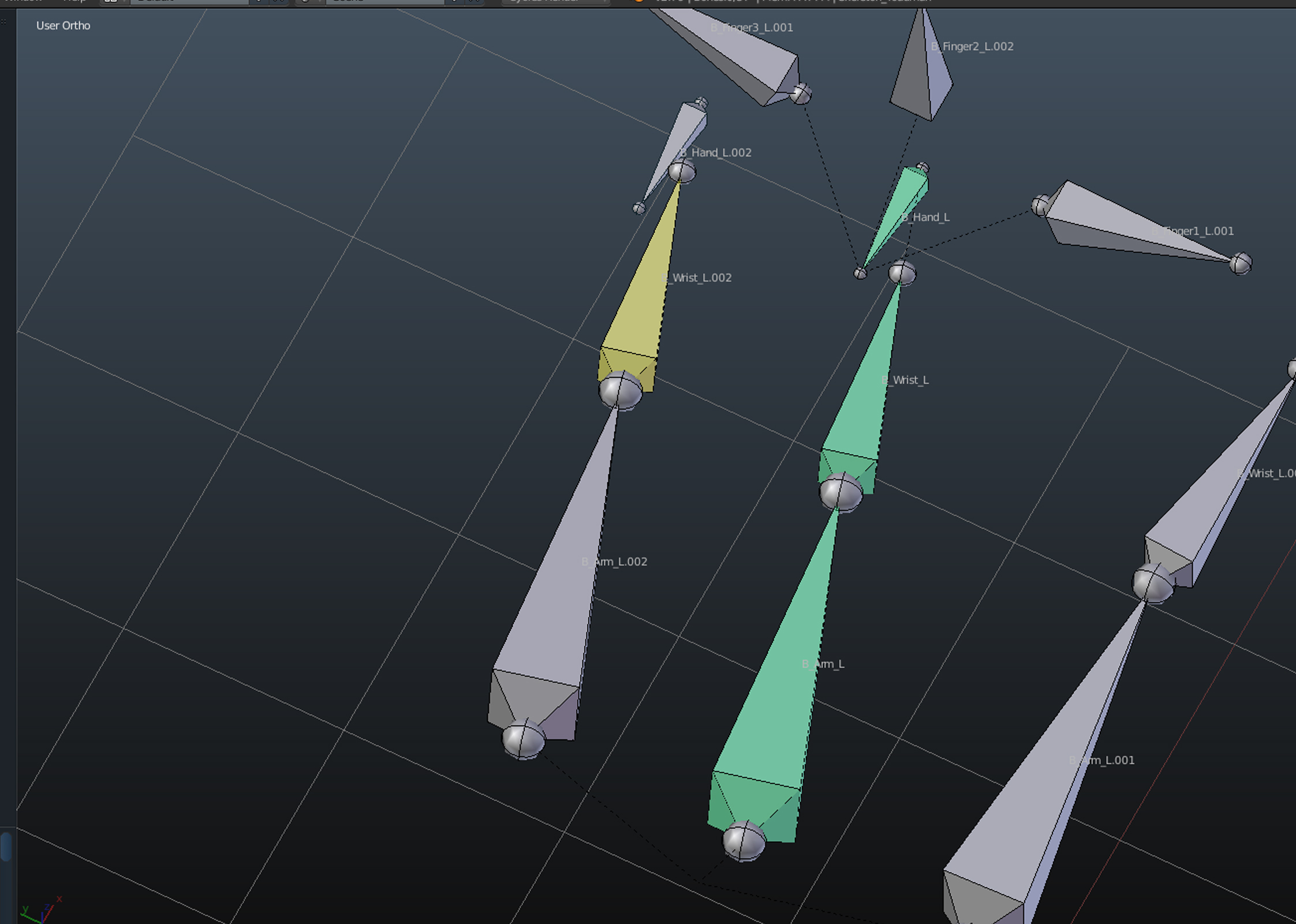
What would be a good solution to make the FK/IK work as intended?