Hello guys.
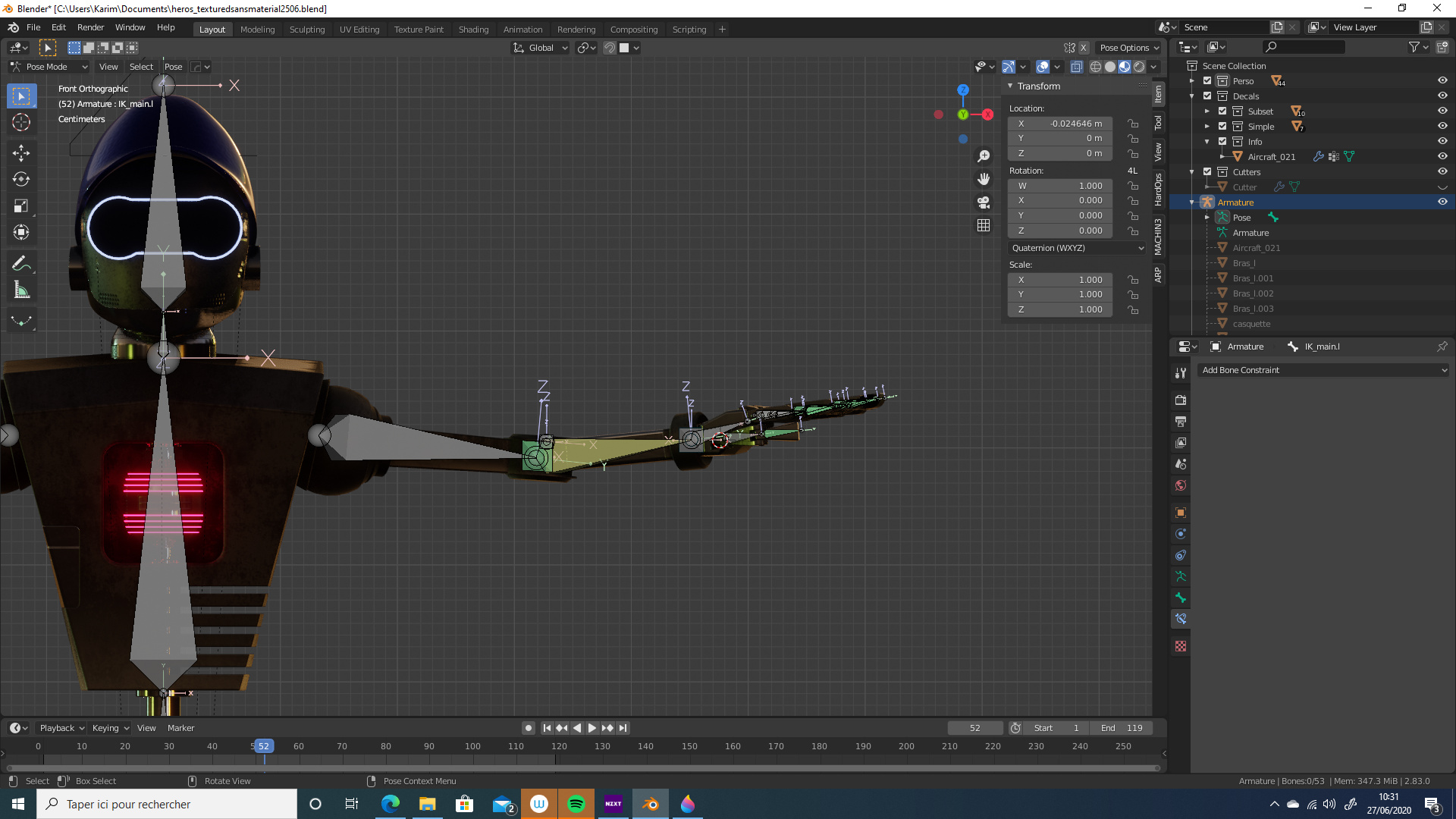
I’m rigging a very simple robot. Working on IKs, the foot one work perfectly fine. I got issues with the elbow though. in “front mode” working on the left arm, when i move the controller of the wrist, left on the x axis, the elbow goes down, and the forarms come across it in a weird angle. I got absolutly no idea how to fix it… Any help would be greatly appreciated.
Thanks in advance.
ps: hope my english is good
ps2: i can of course post pictures if needed.
In the IK setups, do you have targets set up for the elbows? That might be the issue. Otherwise, not sure without seeing what’s going on.
Thank you very much, both of you, for taking the time. I will upload the blend with pleasur if needed but as it is much heavier than 3 pictures, i start with that ![]()
Thanks again !!
As you can see i’m not good in anatomy as i labelled the actual forarm, arm … :x
yes it would help if we had at least the armature (if the problem only concerns the armature)
Ok. my armature is 48mo, and pasteall want something under 25 so i don’t know what to do…
a bit weird that it’s so heavy, maybe check if your file doesn’t have any texture or mesh, otherwise use another platform like wetransfer and paste the address

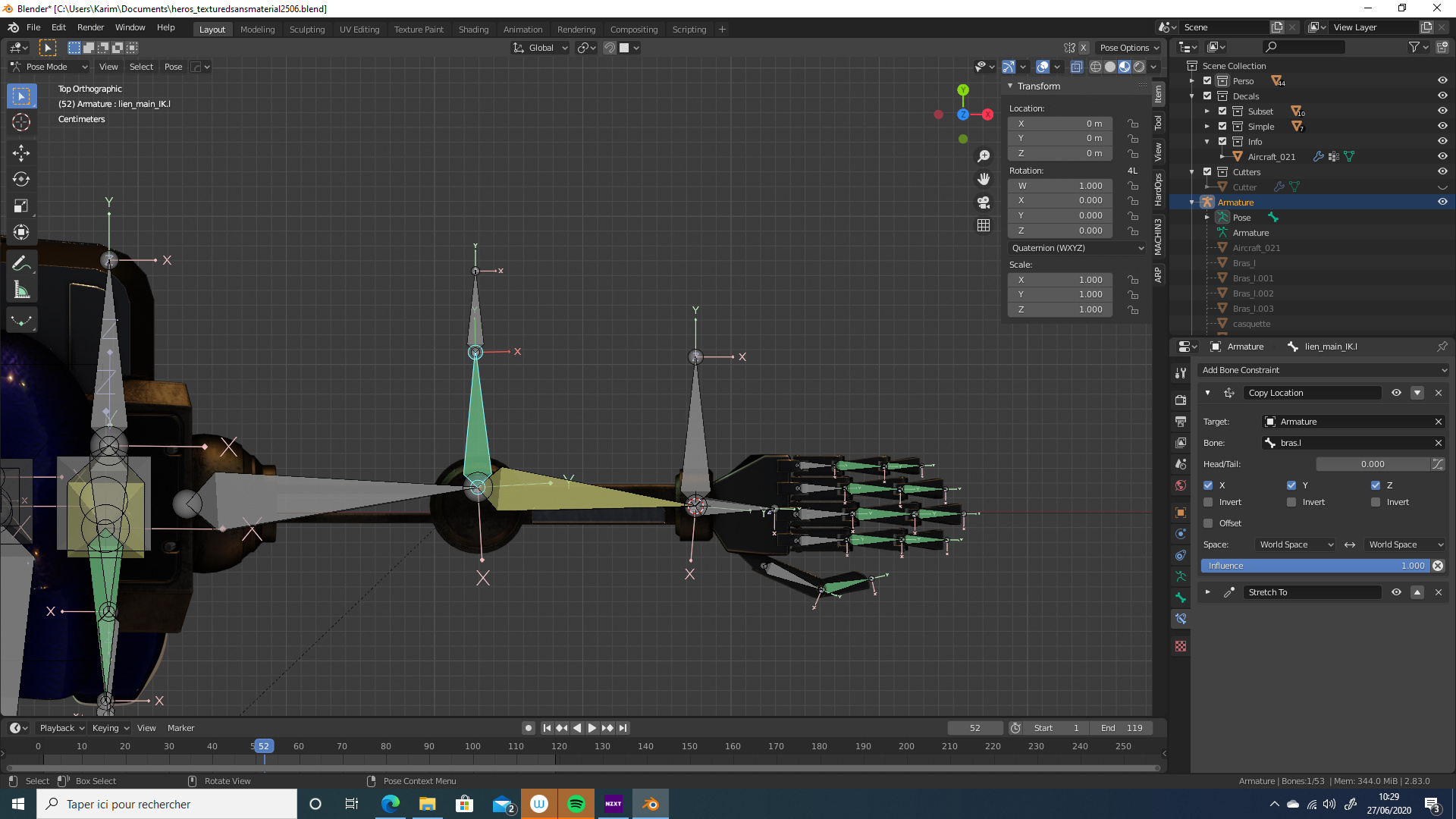
I’m not familiar with this kind of rigging, what is your lien_main_IK.l for?
The person who taught me how to rig used it only as a visual aid for the movement direction…
so I’m not sure about the weird angle you’re talking about, you need to use the pole bone to give the elbow the good orientation, other than that in Rest pose the elbow is a bit bent which is good, you may need to change the IK pole angle (in Pose mode) but it’s in case it twists the mesh weirdly…
thanks a lot. I’ll have a look and try to get it fixed.
Hey choulou,
on the poignet.l bone, you can uncheck “inherit rotation” under Bone Properties>>Relations for the bone, then under Bone Constraints add a “Child Of” constraint that targets Armature>>IK_main.l. That should give you better control of the arm and hand.
Also, not sure you need the lien_main_IK.l bone, at least for the pole target it’s not necessary. Unless you’re using it for something I’m not aware of?
Also, it might be better to move the pole target bones farther back from the robot’s joints, so they don’t intersect with the joint bones when they bend.
Thanks a lot Bluepython  i was travelling so i just checked for new messages. I’m gonna try everything you mentioned and be back for an update!
i was travelling so i just checked for new messages. I’m gonna try everything you mentioned and be back for an update!
@bluepython @moonboots
Hey guys, first of all, thanks again for taking the time and tried to help me. Turns out i just found the the solution about my issue. My arm and forarm were not exactly align on the z axis.
Aligning them in edit mode solved my problem  two weeks on it … pffffiiuuuu. I can move on my next probem lol.
two weeks on it … pffffiiuuuu. I can move on my next probem lol.
Came back to give the solution in case it can help others.
Cheers