I’ve got a leg skeleton with four bones for each leg (two for the upper leg, two for the lower leg) and want to animate it walking. The Inverse Kinematics bone constraint seems like it might be useful, but I only want the leg to bend at the hip and the knee, rather than bending at every bone joint. Is there way to get the functionality of that constraint, but with only certain chain elements bending?
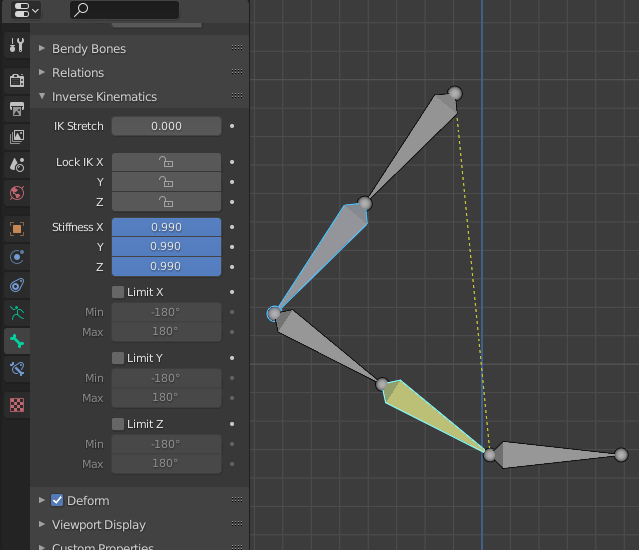
Stiffness isn’t great-- if it has to move a bone with high stiffness, it will.
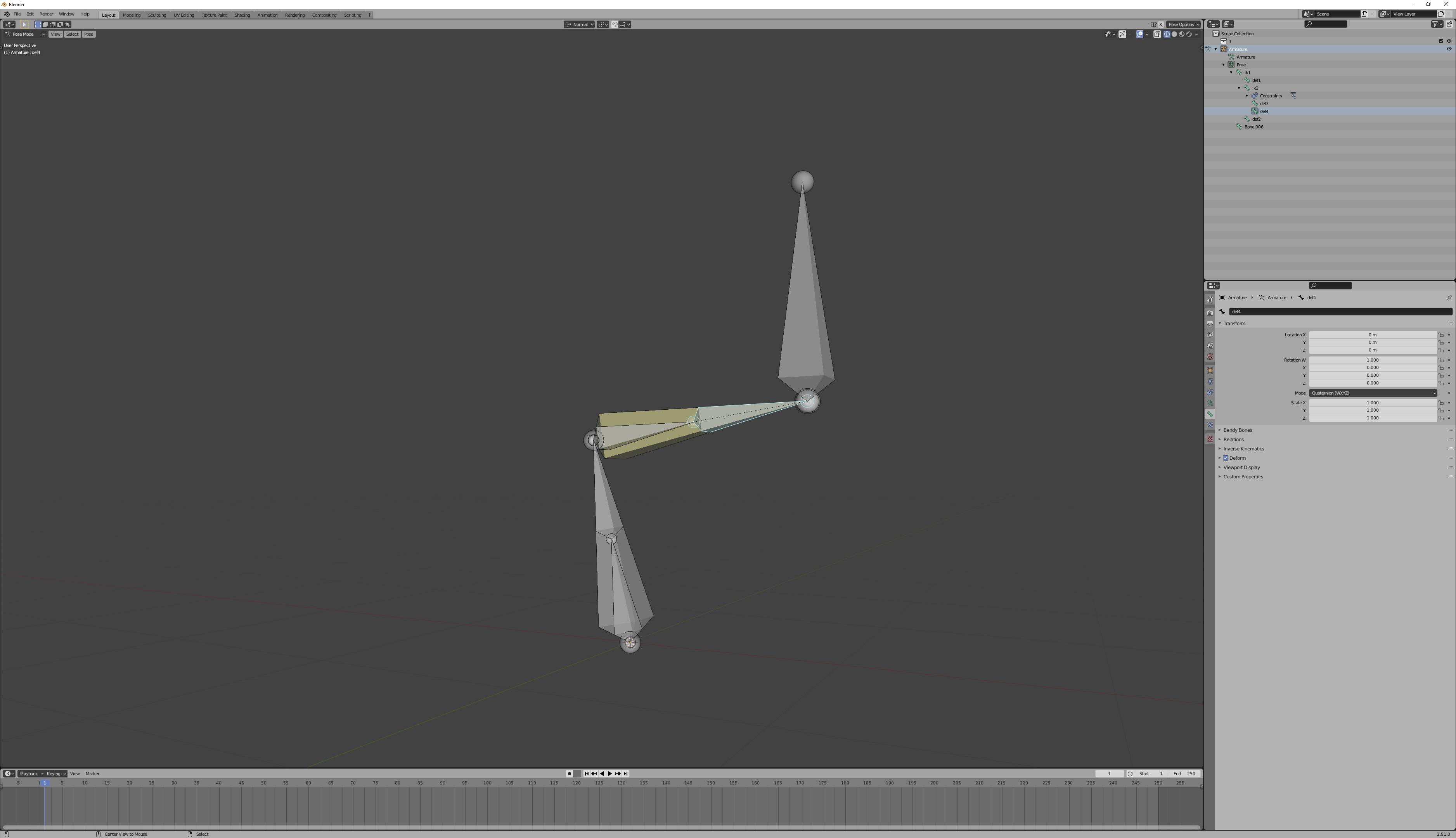
If you only want two bones to move with the IK, then only have two bones in the IK hierarchy. Here’s an example where I use a non-deforming 2-bone IK and I have 4 deforming bones parented to the bones in the IK chain:
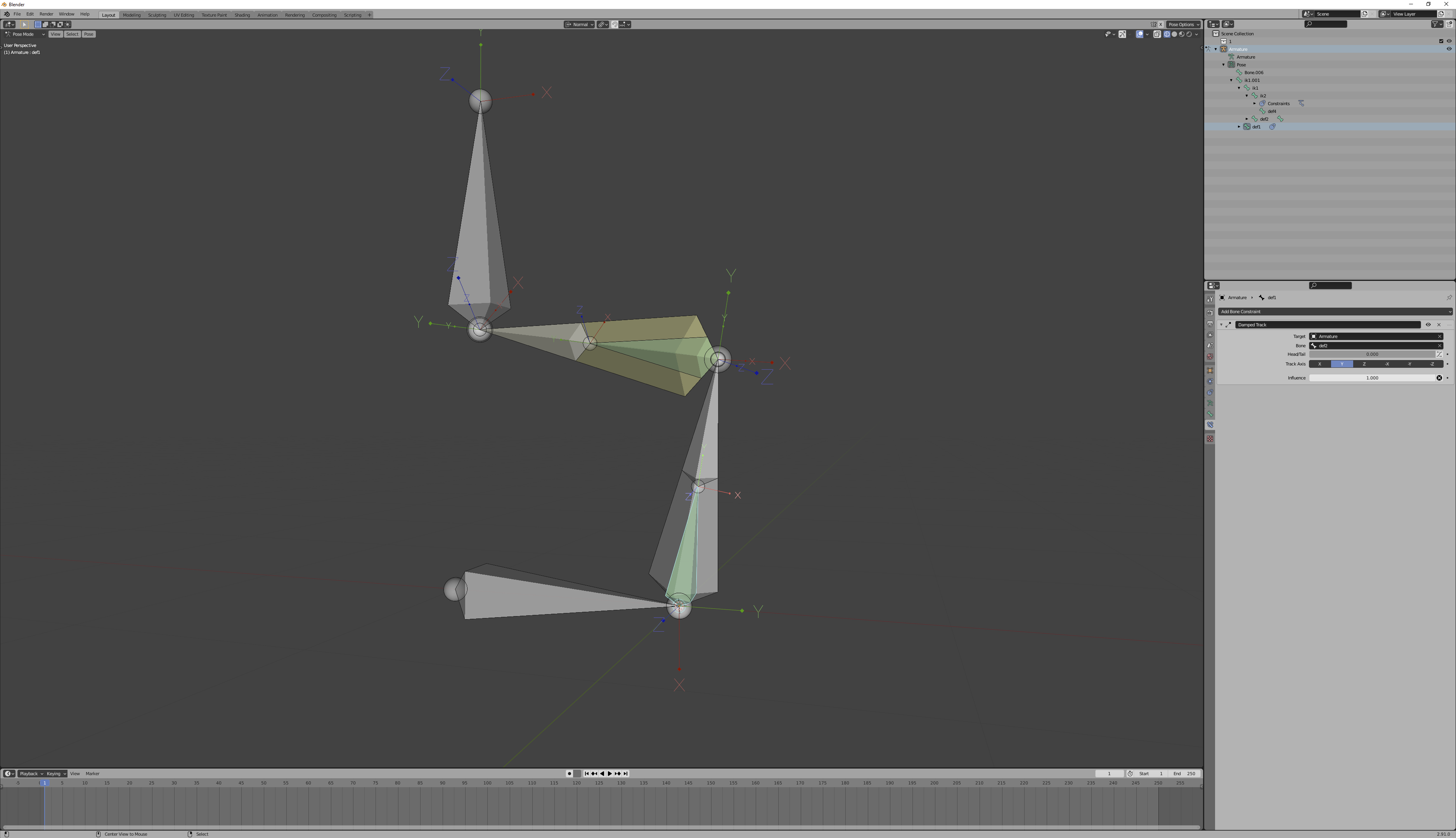
Typically, people are doing what you want to implement twist bones. What you’ll notice is that the structure pictured above does what you’re explicitly asking for, but you might actually want something a little bit different than that. Here’s a typical twist bone setup:
Here, the first bone in the chain isn’t parented to the bone in the IK chain, but to the previous bone (upper thigh parented to hips, upper calf parented to lower thigh), but damped tracks the appropriate twist bone, which is parented to the IK chain.