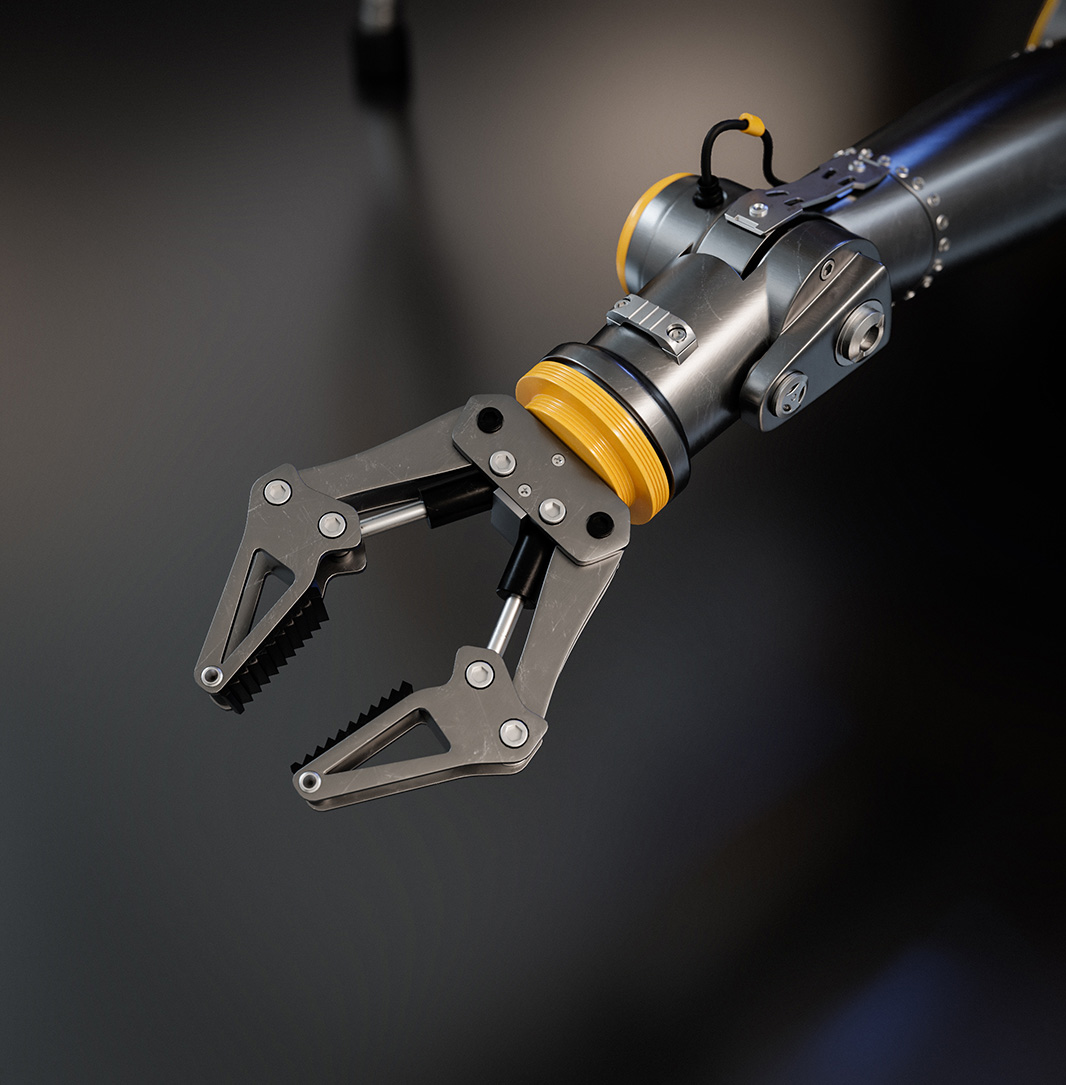
My robot project renders after following the hard surface modeling course of Gleb and Aidy.
The concept of this robot was made “on the fly”. Started with a very simple draft but then i wanted to insist on fonctionnalities/realism. Technically, i wanted to try the workflow on a spherical shape. There is a lot of boolean operations + bevel modifier in there. Sometimes had to fix manually some geometry issues after this combo, but overall, it works great ! Non-destructive worflows are sweat ! 
Rendered in Cycles.


Wireframe :

Process GIF :