Hello all blender Champions!
I`m trying to build proper armature for 6 axis industrial robot. Everything seems to be easy in case of FK - all I need is to lock unnecessary axes and control the robot by changing the values of unlocked ones (attachment Armature-Robot-FK).
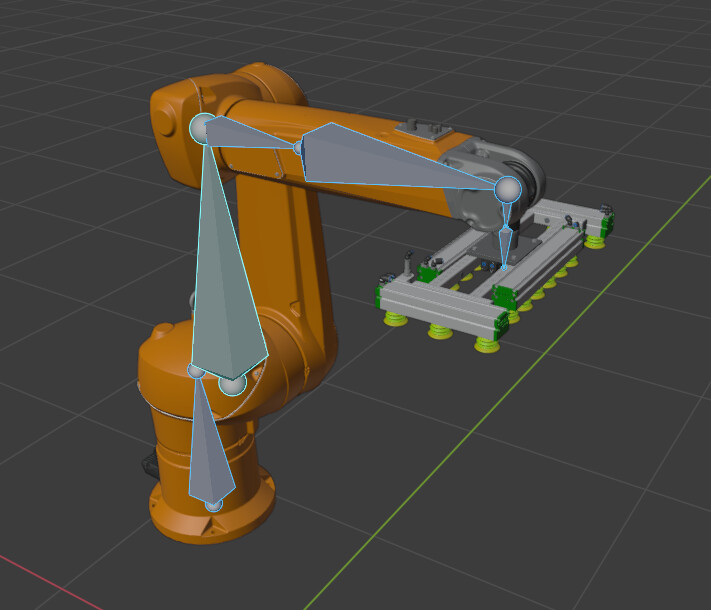
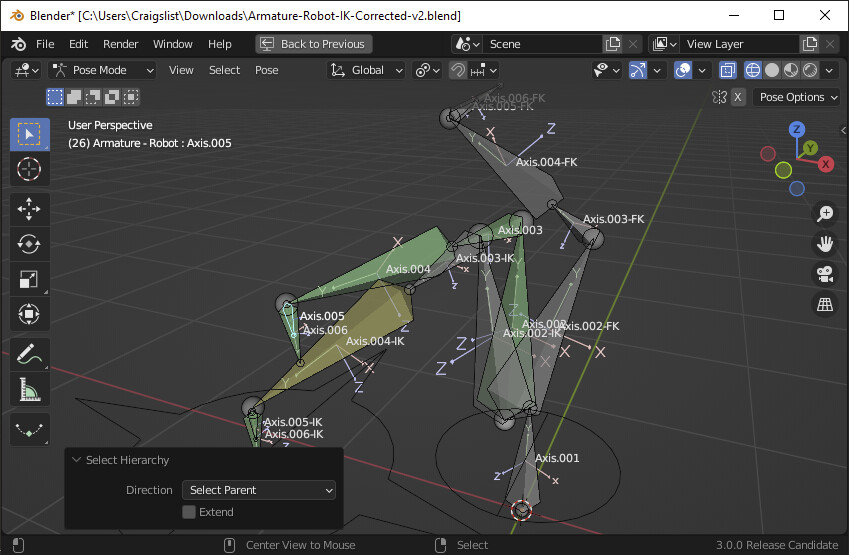
Unfortunately, using only FK to set the proper location of the last (gripper) bone is very problematic. I finally created one animation using only FK, but I took a loooot of time, I needed to create many key frames and sometimes still it was visible that gripper is not always parallel to ground (LINK to the animation) Therefore I was trying to use IK where situation is much more complicated… (attachment Armature-Robot-IK).
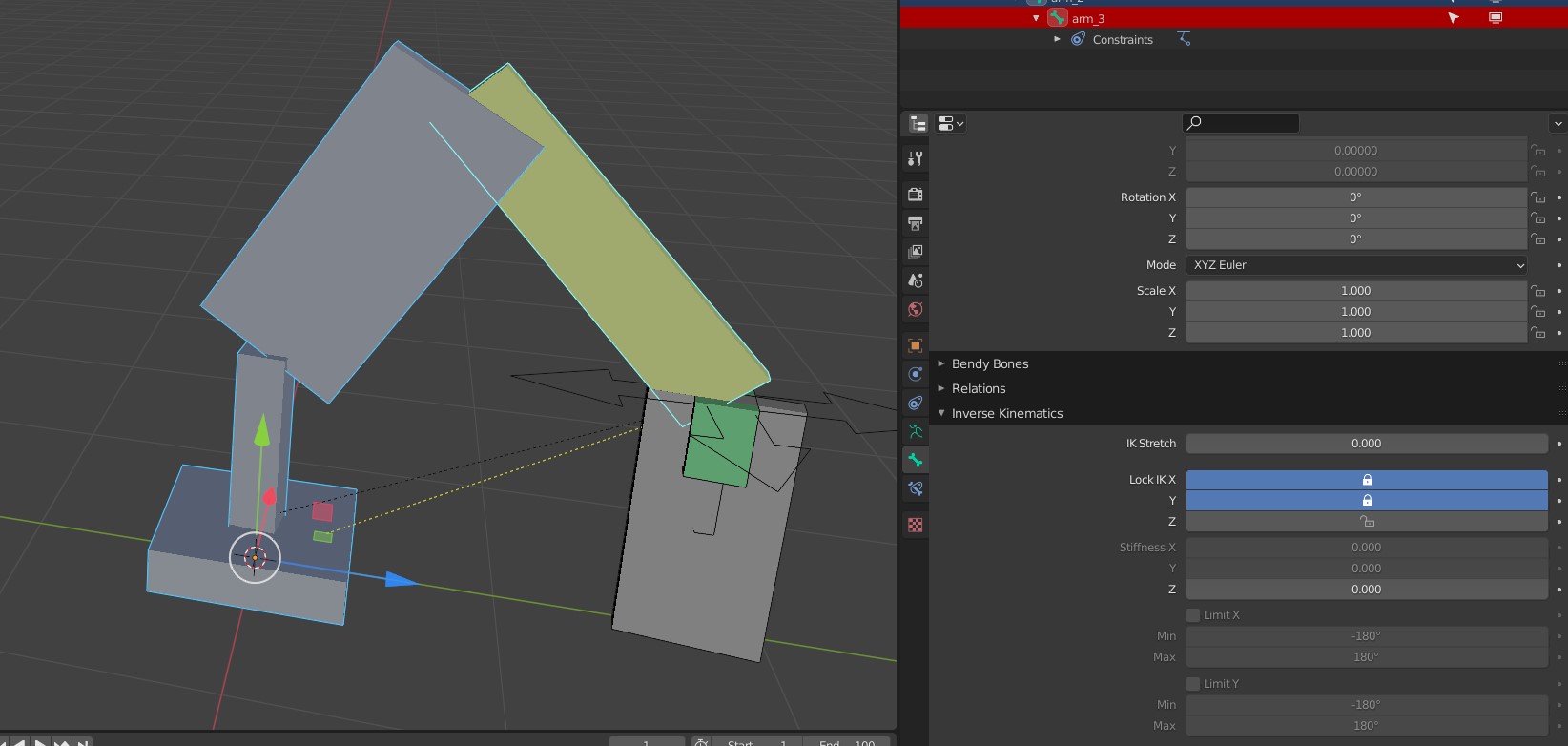
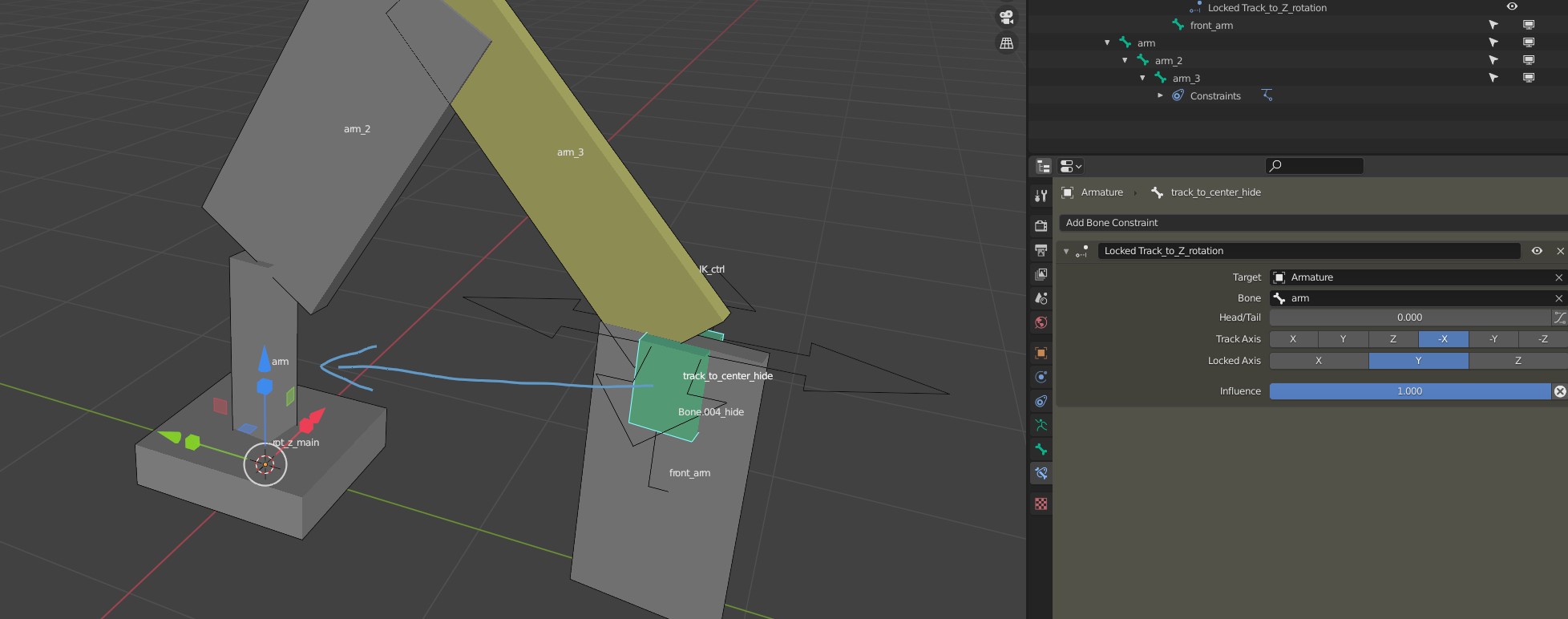
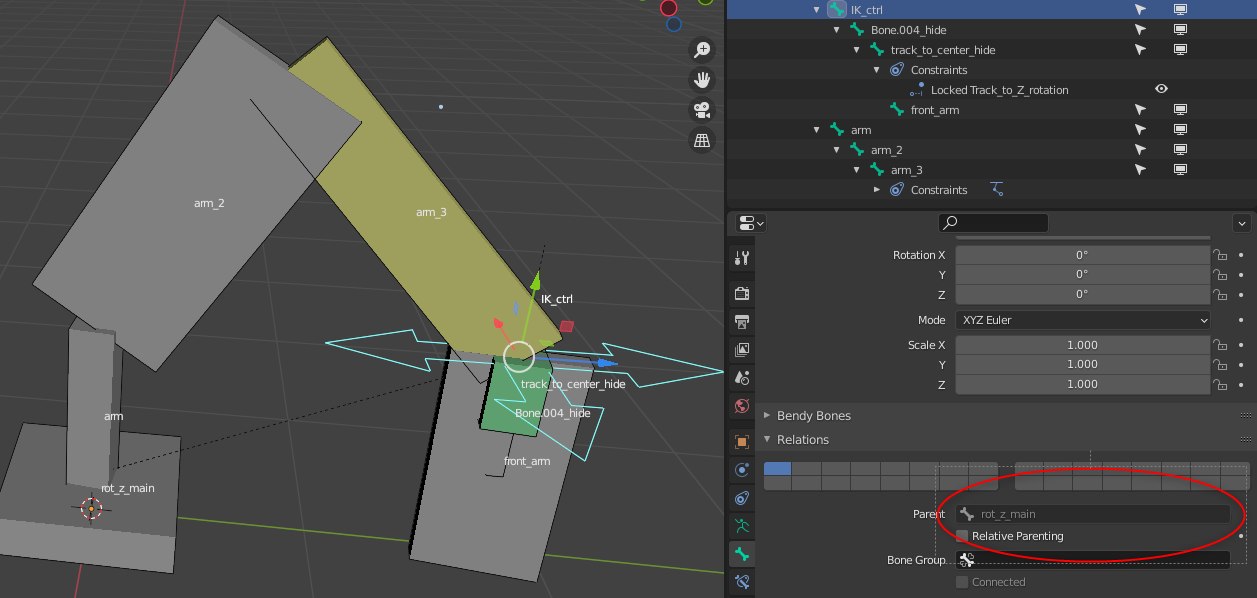
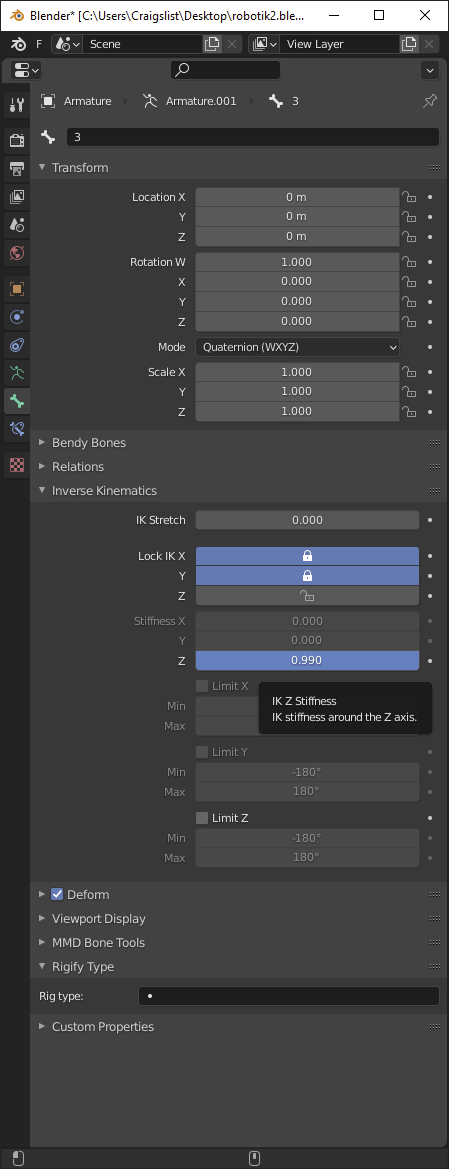
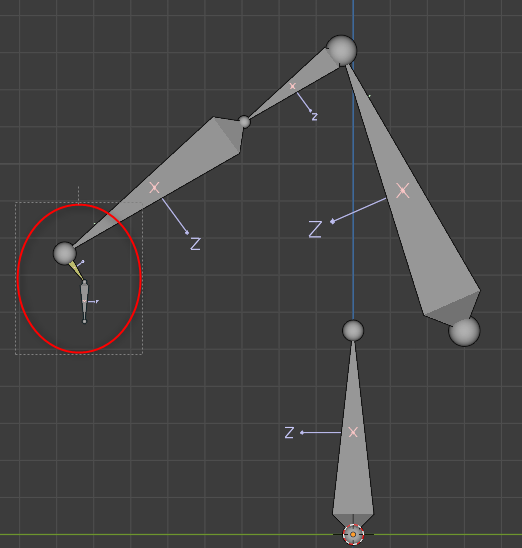
First of all, I cannot use Pole Target for this armature, because it igrones the limits of first base bone (it should rotate only in Y axis)… but without it, armature very often is “flipping” during the robots rotation - even if I set some IK limits for the bones:
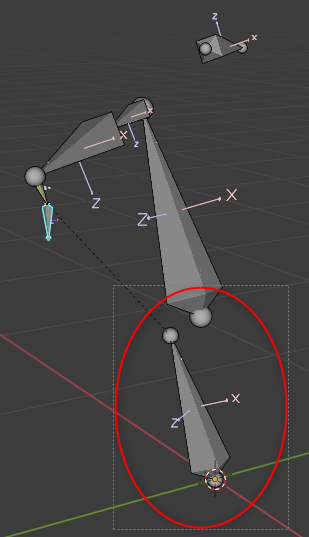
Also using last bone as a controller doesn’t work as I expect, because seccond bone is not always parallel to first one in this situation:
My goal to achive is:
- last two bones are pointed always to the ground (in any frame of animation, without creating additional key frames to correct the position)
- control the robots by changing position of the last bone (it is easier to change only locations and rotation of Y axis - rest of the bones should follow and keeps theirs limits)
Does anyone know how to rig this robot correctly? I will be very gratefull for any sugestions!
Thank you a lot in advance!
EDIT: I forgot abouit the attachments
Armature-Robot-FK.blend (781.0 KB)
Armature-Robot-IK.blend (803.2 KB)