Thanks for the compliment, but I am just a regular guy who hates bad deformations. No need to feel honored, but that was a nice thing to say.
OK. Here are a few things that have helped me with the deformations on thicker limbed characters.
One thing I have tried and had success with in the past is to use an action constraints to separate the deformation bones. This is probably the easiest way to fix the scissoring problem if you are creating a rig from scratch.
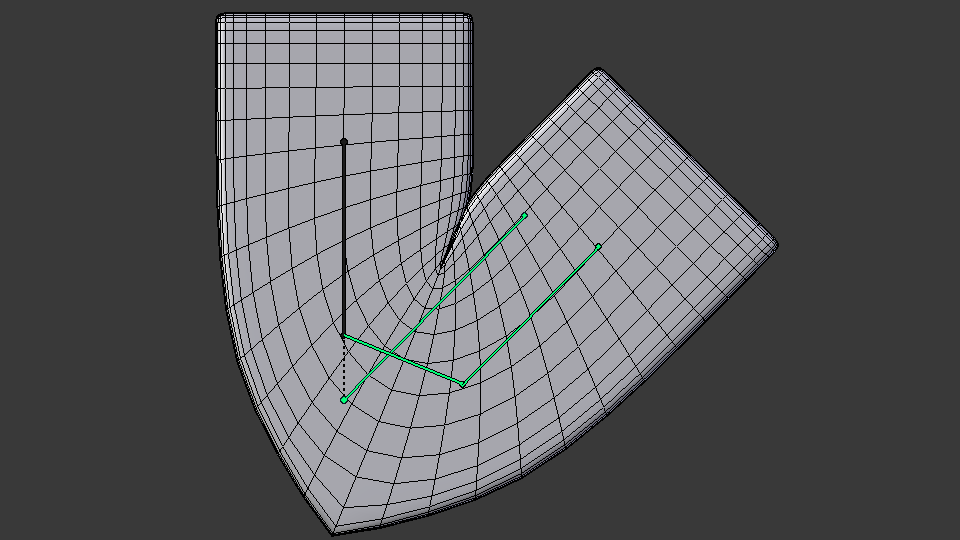
In the screenshot, I have the forearm deformation bones rotating away from the upper arm to fix the scissoring. If I remember correctly, the rotation starts when the forearm control goes past 90 degree. Please keep in mind that I have not used any corrective shapes or helper bones in this image. With a bit more effort, the deformations are very good at extreme rotations.
This was done by modifying the original Rigify rig. I won’t go into all the details on how to replicate it because there is a better solution already available in Rigify.
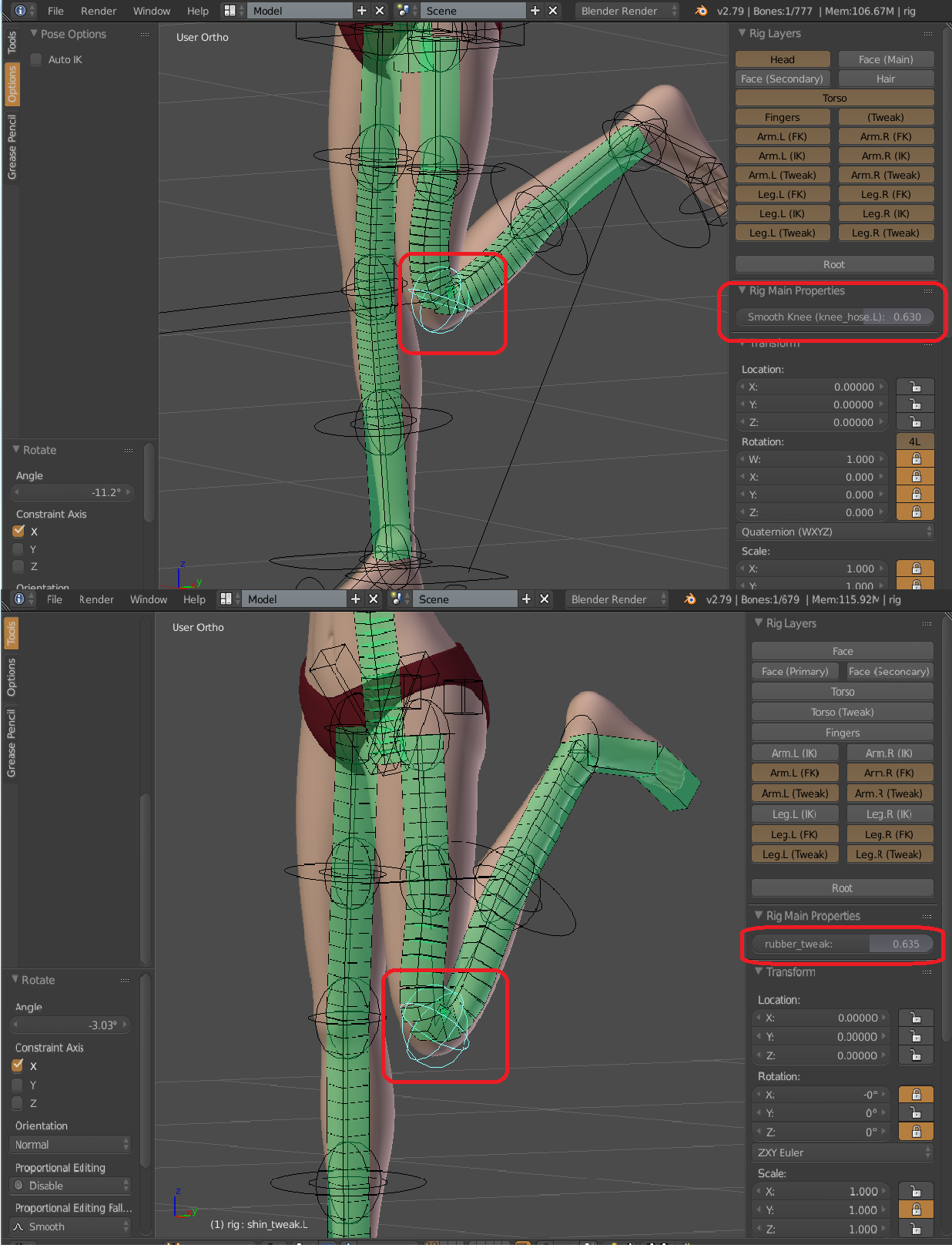
A solution that is available within Rigify is to use the Smooth Knee/Elbow parameter on the original rig, or the Rubber parameters on the pitchipoy version. (Select the tweak bones.)
I overlooked this for quite some time thinking it would only be useful if I wanted a character with bendy limbs. Now that I know better, I use this all the time to get some separation between the joints. Pick a good value that fixes the intersections on your character. You can animate the value, but I prefer to just set and forget it once I find the value that works best for my mesh. Then, add corrective shapes or use helper bones to fine tune the deformation. (Or use both.)
Here is what that looks like with Eve from my Rigify Tutorial series. (Without helper bones or corrective shapes.) Top image is the original rig, bottom is pitchipoy.
And finally, you have inspired me to take another shot at a three bone rig.
Arm rig.DanPro.blend (443 KB)
In the file I have two armatures that could help get you going in the right direction. I have not skinned a mesh to these so I am not sure either solution will be what you want. Hopefully, you can fine tune them to get the results you are looking for.
The first armature has an upper arm that is split into two deformation bones. The controls are a standard two bone setup. The central bone is set to copy the upper arm bone by 50%. Next the third bone has a damped track to point at the hand and a Stretch To to keep it from separating from the hand.
I am not sure I like this solution at all. I think the stretching will be very apparent.
The second armature is a bit more complex. The controls are again only two bones. The central deformation bone will always rotate from the central point and rotate 50% of whatever FK.002 does.
The controls are on layer one, def bones on layer two, and mechanism bones on the third layer. Hopefully it should be easy to reverse engineer.
I like the second solution a bit better because there is no stretching or separation of end points on the deformation bones. Again, I have not tested it by skinning a mesh to this rig, but it looks promising if you want to continue researching a three bone solution.
Good luck! Let me know how everything turns out.