Saw that little monster walking on that girl’s face a few days ago and so I felt a sudden urge to start making a robot spider with hydraulics and stuff. This is where I got so far. The legs’ base and the hydraulics of it.

Mooomyyyy I don’t want to rig that thiiiing.
I want to but damn… I have no idea how. Any help? The hydraulics are easy but connecting them to sync with the movement of the legs and their bases…

Good idea for a project. Focus on a proper skeleton before you jump to hydraulics.
And get a few reference images…will give you a better idea about proportions
keep well
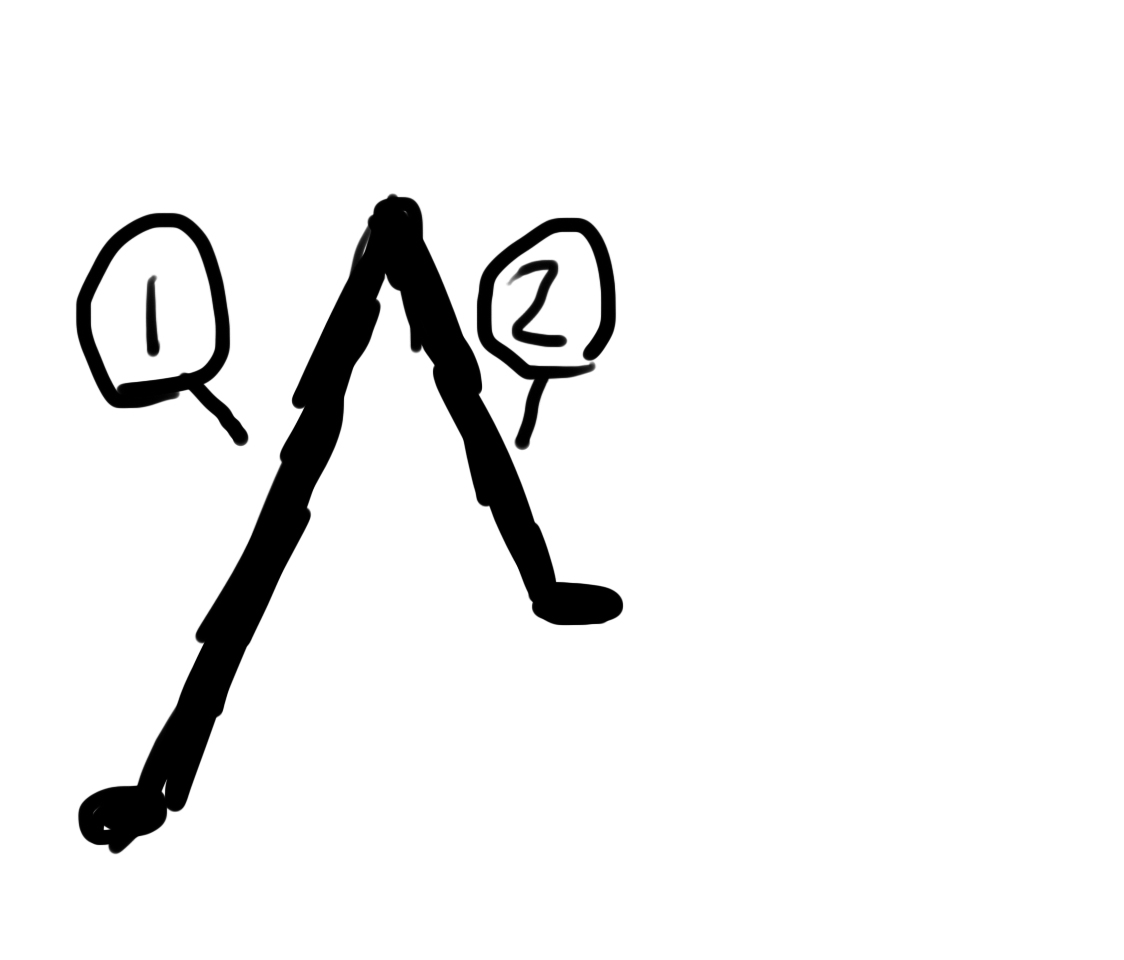
As the basic pic above shows, a spider supports its weight with (1) part of the leg, while (2) part of the leg supports the body. it would not have the strength to lift joint (2) up like you have in your robot.
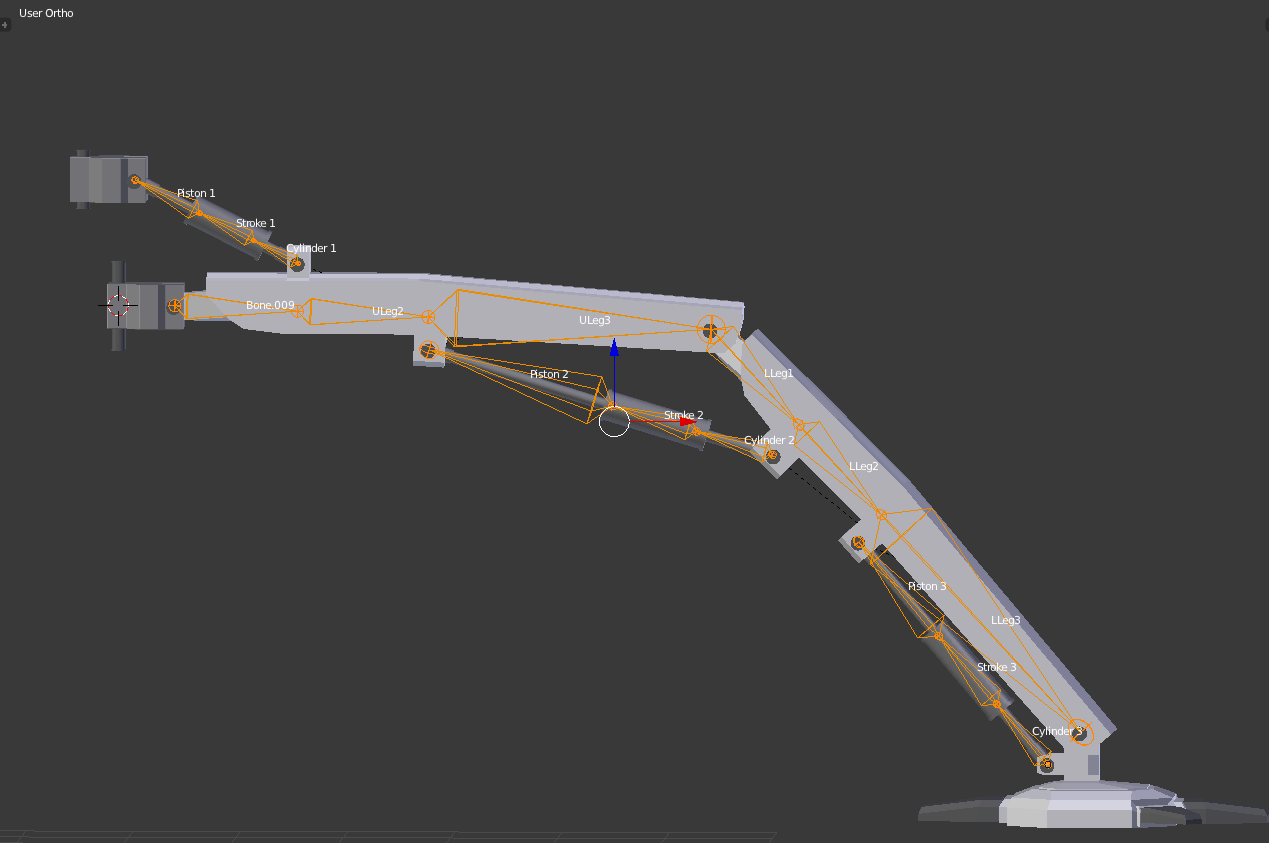
I posed it that way so I can edit it easier. But now the problem is not the pose of it but the rig.
This is how it is now. I have no idea how to constraint them or how to modify it to work well. Tried the way I did with my other model but I can’t connect the IK Constraint the right way.
I made a piston in Blender 2.49, I can’t believe I still have it lol, maybe you can use it.
too many bones! for the ik, just have one bone for each leg section and one for the foot. at the foot add a seperate bone (not parented to any of the other bones) and call that the ik target. select the foot bone and add the ik constraint and point it to the IK target bone. make the chain leangth 3 and thats it. the pistons are a little more complex as you need a stretch to constraint, and i’m not sure how to describe the rig so you can understand it, but it is something like this.

though i am not quite sure if the target bone should be on the next joint along facing towards the body, i think it is right
looking good ^.^