Hi everyone, this is my first post. As a Blender enthusiast and somewhat new to rigging, I’m trying to create a very specific setup for an IK leg. Here it is:
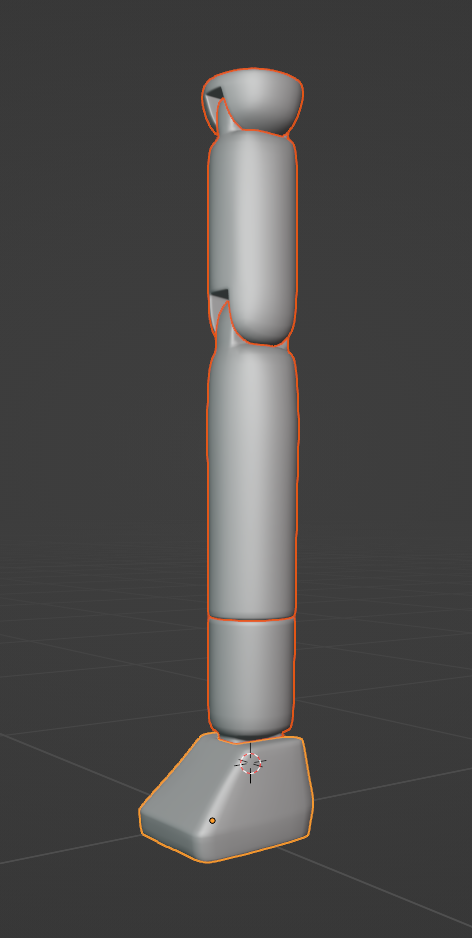
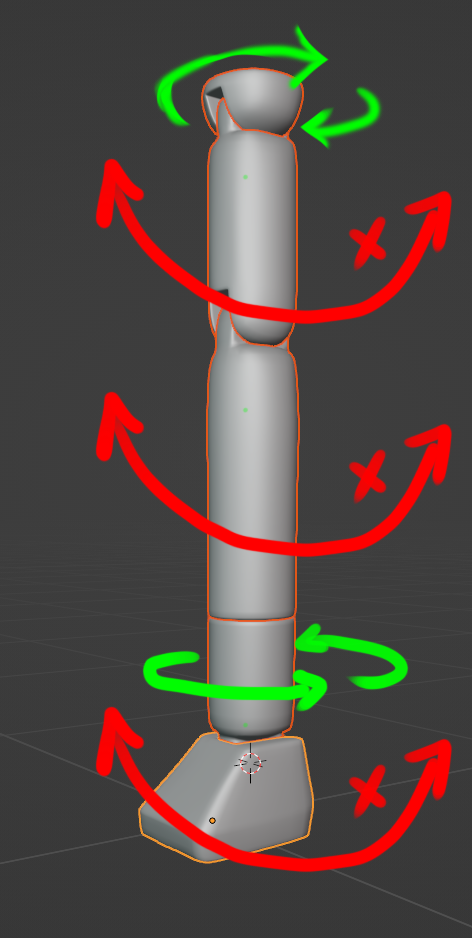
The character is an articulated wooden puppet, but I would still like to have IK legs. The idea is that the top element would rotate together with the pole vector or control it. The thigh would only be able to rotate on X, the shin also only be able to rotate on X. and the foot also slightly rotate on X. And added bonus would be that the foot and the “sock” or ankle region also rotate on Y.
I have tried rigging a regular IK setup (without a pole vector) and adding Locks to the IK, but it’s not possible to lock the top element or what would be the root joint. I tried adding another joint on top of that, but it didn’t achieve the job either. Furthermore, this setup would sometimes invert the knee bending making it hard to control during animation.
I then tried rigging with a pole vector, but this broke the IK Locks as well.
Just wondering if anyone has any ideas on how to approach this setup. Any help would be much much appreciated.
Hey! Thanks for your contribution. I can see your point, but this solution doesn’t implement Inverse Kinematics. Ultimately the rig will be used to be part of a character for animation, so I can’t rely only on Forward Kinematics.
That gets you a single IK that’ll reach your target if it can. However, I don’t recommend handling things like this, because the leg that have designed has a lot of ambiguity in the solution, and ambiguity means twitch. And if you make it position+rotation IK, then it no longer has enough solutions. I would recommend instead dividing it into 2 different IK chains: thigh+calf, calf twist + foot, with hip outside of IK, used just as a parent. That makes it so that you now need an additional control, but it eliminates all ambiguity from the solution.