I figured it might be useful for people to have access to matrix operations in shader nodes.
These could be used for a variety of use cases including manually converting between color spaces or working in specific or randomized coordinate frames.
Pretty much all of this should also be translatable right into Geometry Nodes if you need anything of the sort there.
First things first: How to bring a matrix into Blender’s shader nodes?
Let’s start with the most obvious case, the 1×3 matrix, aka a column vector:
Column Vector in ℝ1×3
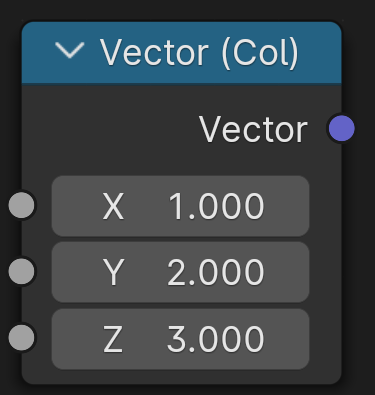
The vector
1
2
3
From there, it’s easy to add extra columns:
A 3×3 matrix is just a collection of three column vectors:
Matrix in ℝ3×3
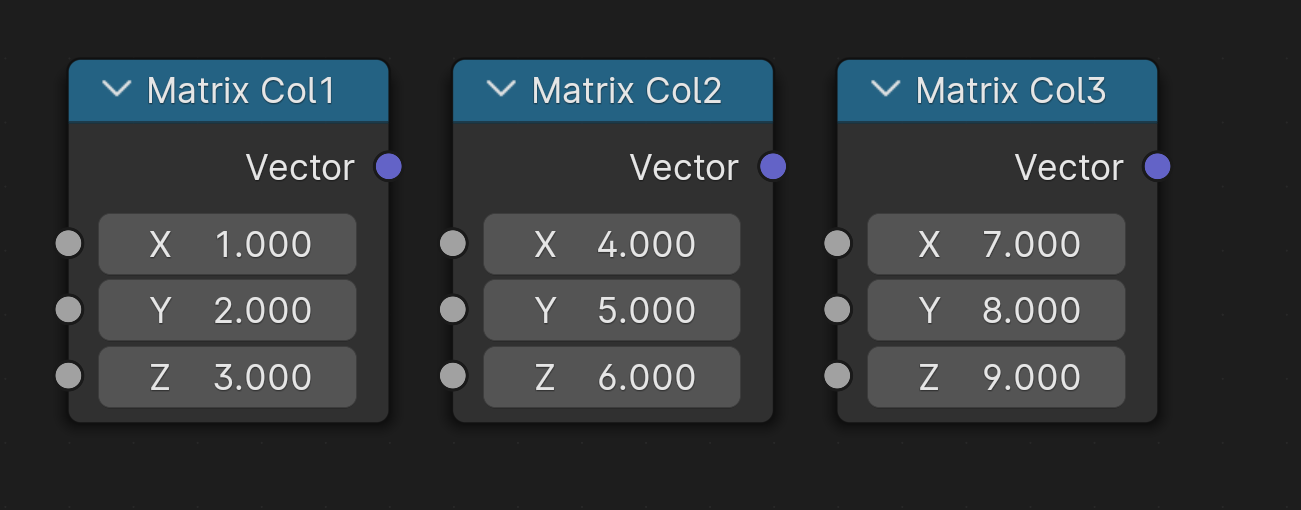
This represents the matrix
1 4 7
2 5 8
3 6 9
A fundamentally important matrix 𝟙 which is the unit matrix. It has the properties:
- 𝟙 v = v
- 𝟙 M = M
- M 𝟙 = M
- 𝟙2 = 𝟙-1 = 𝟙
and simply looks like this:
Unit Matrix 𝟙3 in ℝ3×3:
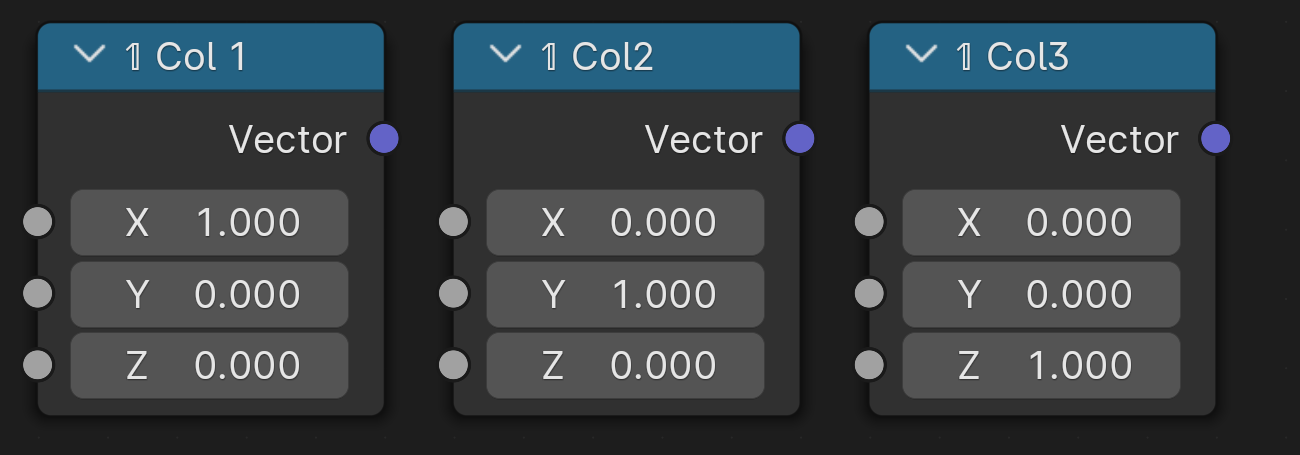
It’s called the unit because it acts like the number 1 does for regular numbers. It’s basically a no-op.
And now, let’s define some fundamental operations on matrices:
- multiplication M v or M N — applying M to v or to N
- transpose M⊤ — swapping columns and rows
- determinant det(M) — the volume spanned by the vectors that make up the matrix
- trace tr(M) — the diagonal
- inverse M-1 — defined as M-1M = M M-1 = 𝟙. (not defined for all matrices, might yield division by 0)
there is also a Pseudo Inverse M+ which would allow for the closest thing to an actual inverse when that fails, but it’s more complicated and I haven’t yet figured out how to do that.
Multiplication of matrices is always defined by the rule “row times column”. In particular,
u⊤v — “the transpose of u times v”
means the same thing as
u·v — “the dot product or inner product of u with v”
and can, of course, done as simply in shader nodes as this:
u⊤v = u·v, the scalar product
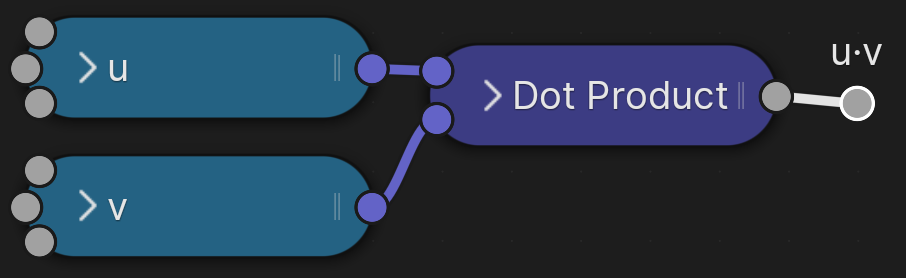
This is the fundamental piece of our matrix multiplication setup. The dot product tells us how long the piece of v is, that is parallel to u (or, in fact, vice-versa). So it’s going to be the coordinate of v that follows u.
However, to correctly multiply matrices, because the procedure asks us to “multiply rows by columns”, but our matrices are given in columns, we actually first need a way to swap columns and rows. Thankfully, that’s exactly what the Transpose of a matrix M⊤ is all about:
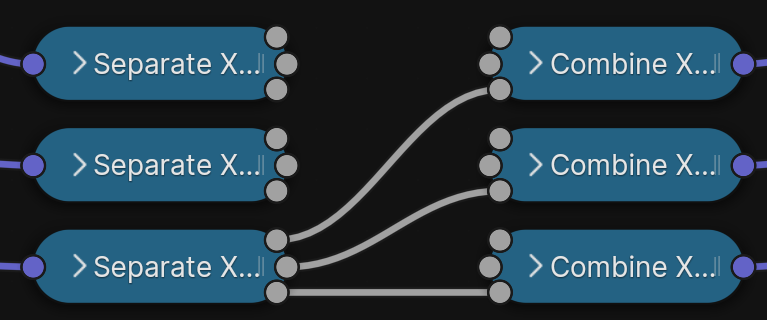
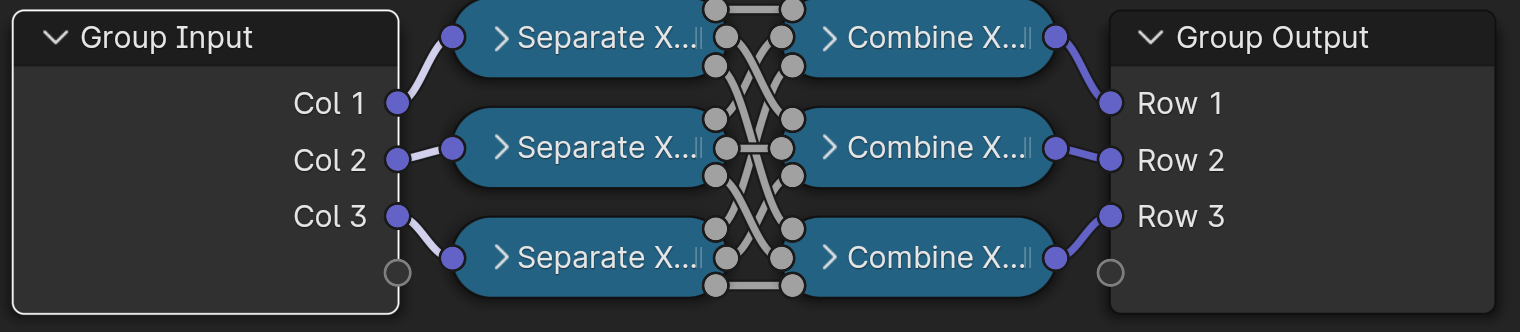
M⊤, the Matrix Transpose, turning columns into rows
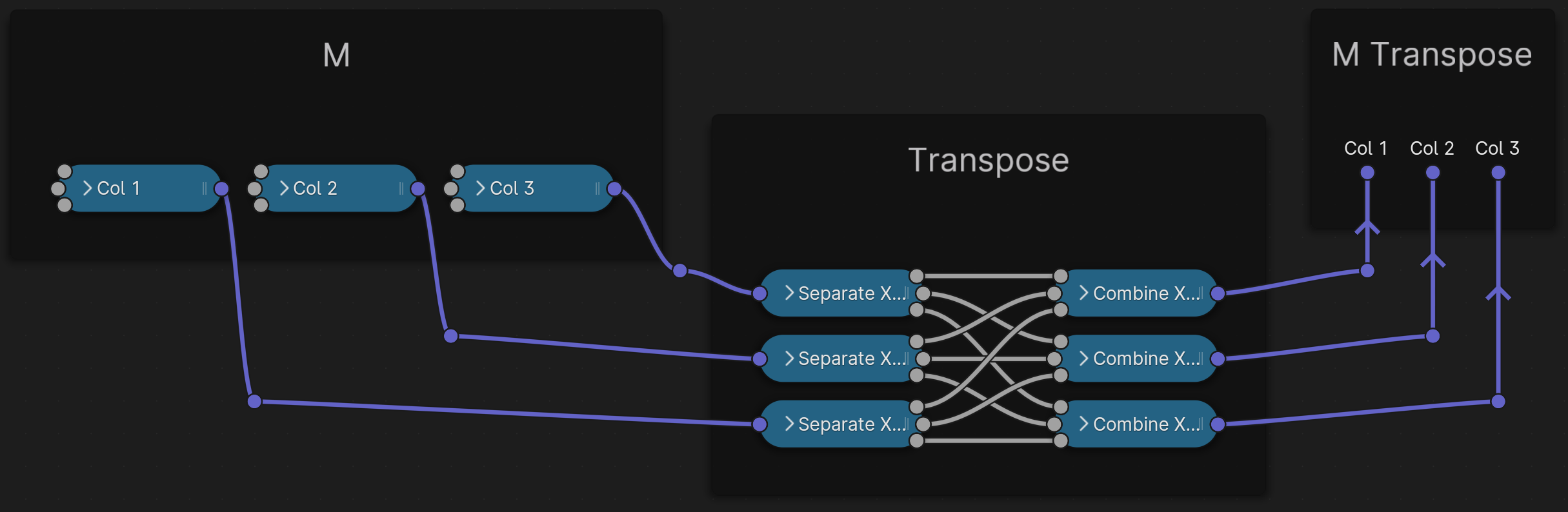
This is very simple to construct. Here just the individual strands starting from one node each:
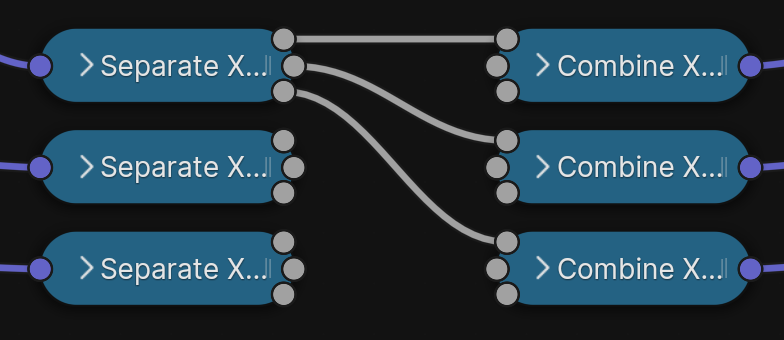
I recommend putting it in a group as we’ll need it a bunch:
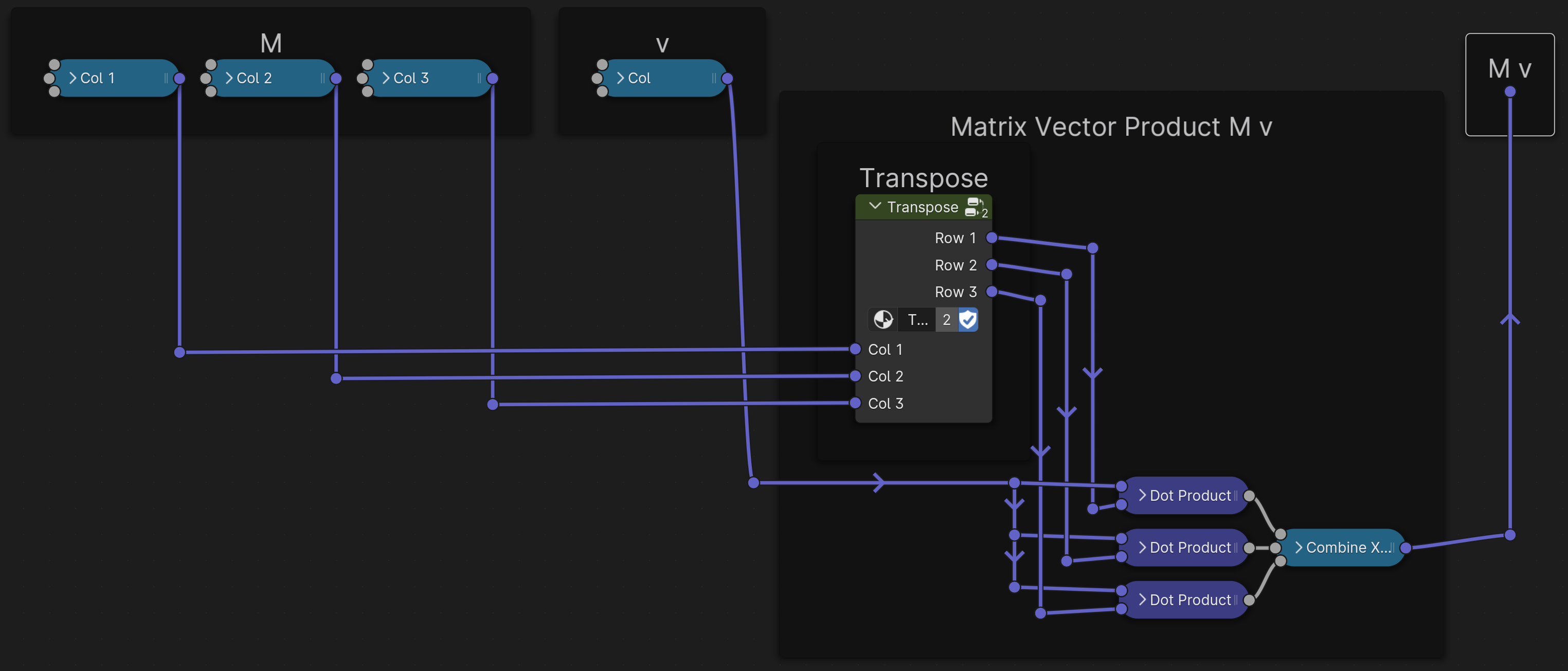
Now that we have that, we can complete our Matrix products:
M v — a Matrix applied to a column vector
M N — a Matrix applied to a Matrix
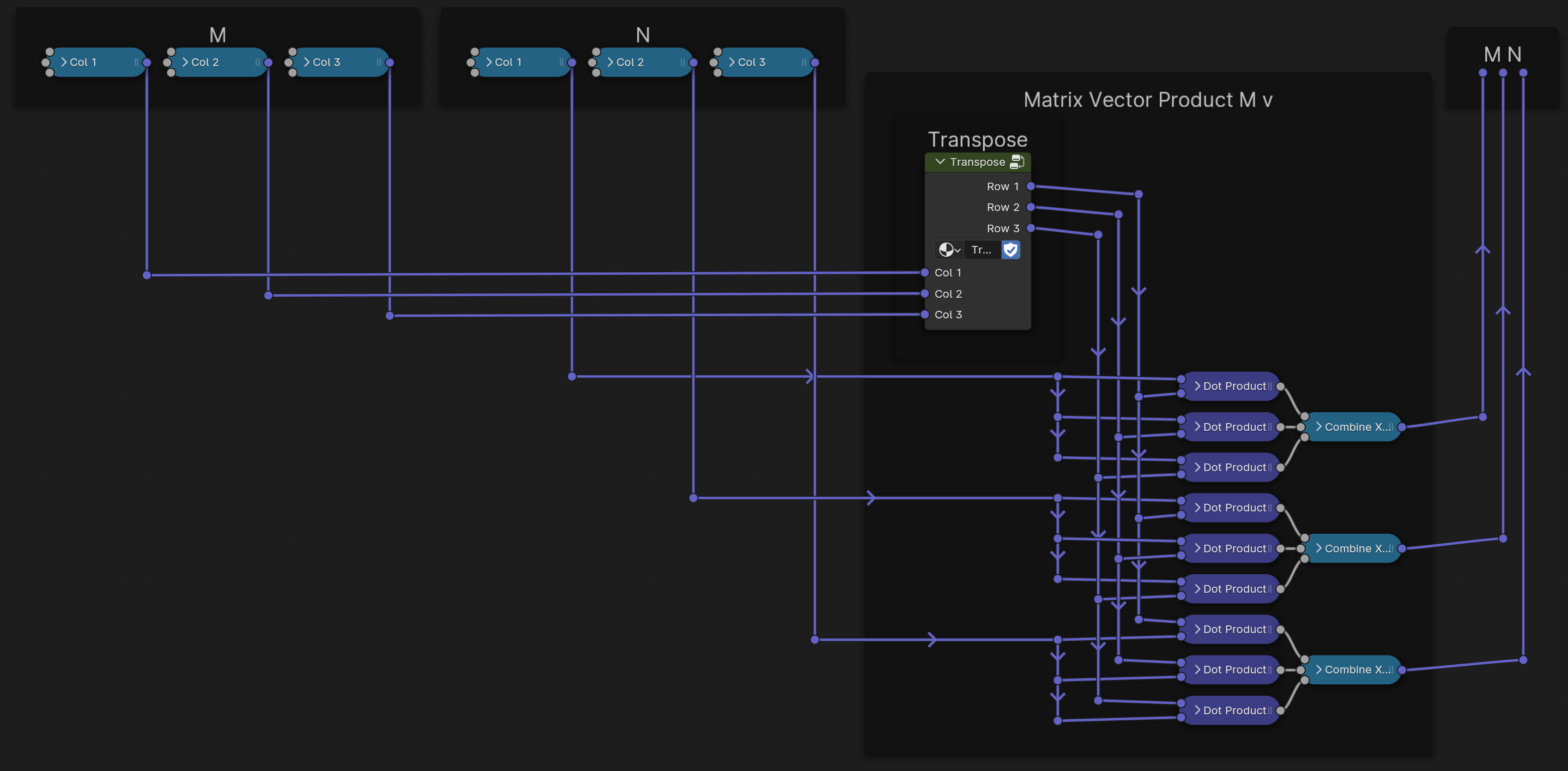
These two are going to be the main operations you’d like to use at any given time, so it’s a good idea to also turn both of these into a group.
However, it’s also going to be important to have the ability to invert matrices in order to undo whatever transformation you made.
The inverse of a matrix is the one that, multiplied with the original matrix, turns into 𝟙.
In particular, if you have these two matrices:
M = [u1 u2 u3]
N = [v1 v2 v3]
the various products
ui⊤vj
ought to yield either 0 (off-diagonal) or 1 (diagonal):
⎡u1⊤⎤
⎢u2⊤⎥[v1 v2 v3] = 𝟙
⎣u3⊤⎦
For instance,
u2⊤v3
is supposed to be 0, because the subscripts don’t match up, whereas
u1⊤v1
is supposed to be 1.
We therefore need to find a vector u1 that is normal to both v2 and v3. (and so on)
As luck would have it, there is a simple operation that does this: The cross product. So let’s define:
u1 = v2 × v3
u2 = v3 × v1
u3 = v1 × v2
and with that,
⎡(v2 × v3)⊤⎤
⎢(v3 × v1)⊤⎥[v1 v2 v3]
⎣(v1 × v2)⊤⎦
is going to be a matrix that is 0 in all off-diagonal entries.
However, at this point the three diagonal entries
(v2 × v3)⊤v1
(v3 × v1)⊤v2
(v1 × v2)⊤v3
could be anything, so we have to rescale by this.
It turns out, that no matter what, these three combinations turn out to be the exact same:
(v2 × v3)⊤v1 = (v3 × v1)⊤v2 = (v1 × v2)⊤v3
so we only actually need one of them. Let’s just choose the first one. This is also called the Determinant det(M) of the matrix M. Since you’ll have to divide by this to get to a unit matrix, if the determinant is 0, the result will be undefined. So the determinant determines whether any given matrix is actually invertible.
In fact, it captures the volume spanned by the three vectors [v1 v2 v3]. If the determinant det(M) is 1, that means any object you send through that matrix will have constant volume. It might get squished in one direction but it’ll have to inflate in the other two. And if the determinant is negative, that means you’ll mirror the object on top of the other transformations.
But anyway, so what we have to do for the full inverse M = N-1 is this:
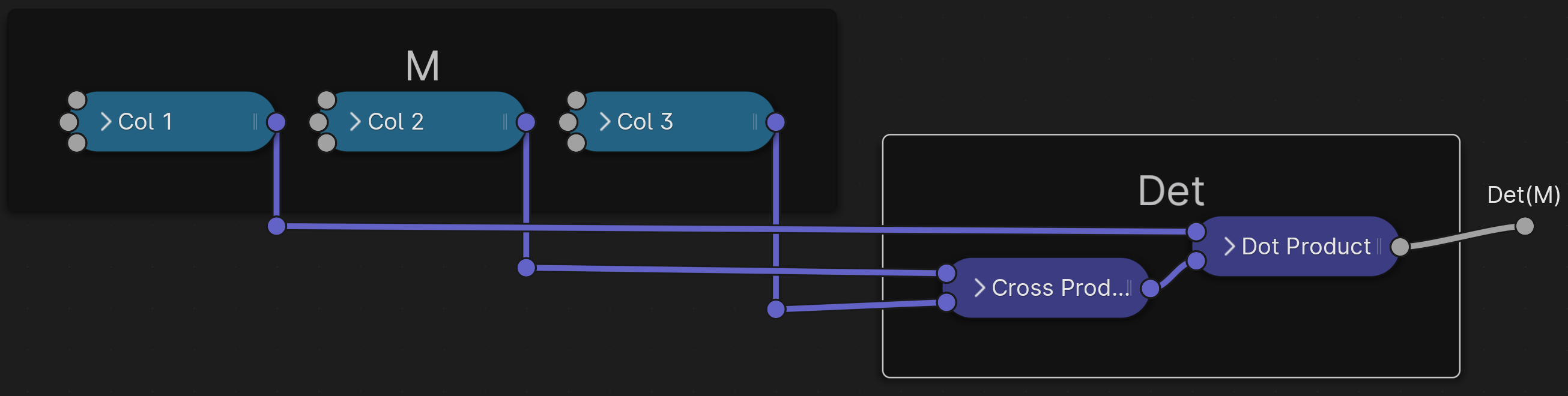
- find the determinant of the matrix N:
Det(N) = (v2 × v3)⊤v1 - build the other cross products:
u1 = v2 × v3
u2 = v3 × v1
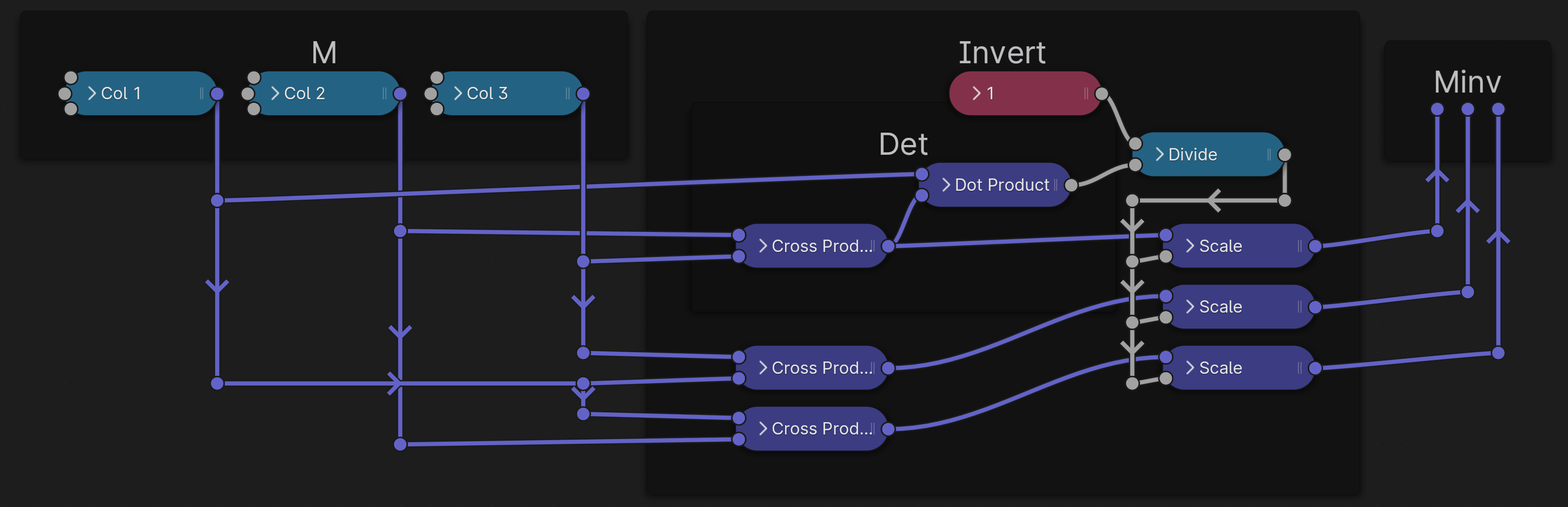
u3 = v1 × v2 - N-1 = [v2 × v3, v3 × v1, v1 × v2] / ((v2 × v3)⊤v1)
Although matrix multiplication is not commutative (so M N isn’t always the same as N M), the inverse is the same for both sides. So that completes our inverse matrix.
In nodes that looks like this:
Det(M) — the determinant of Matrix M.
M-1 — the inverse of M
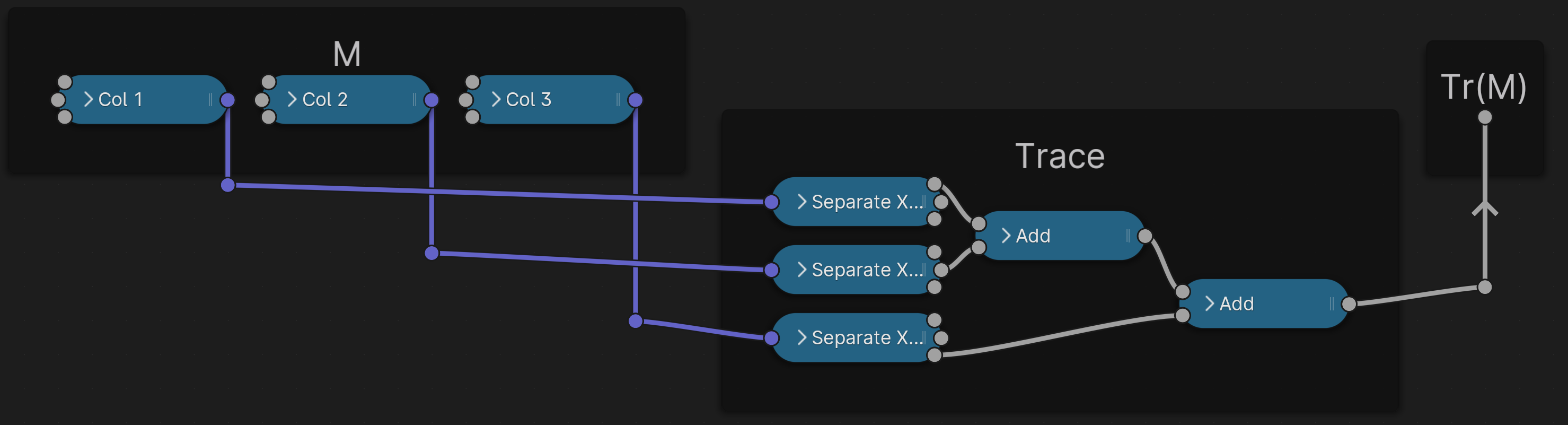
Finally, an important matrix invariant that often comes up is the Trace of the matrix. This simply is the sum of the diagonal entries:
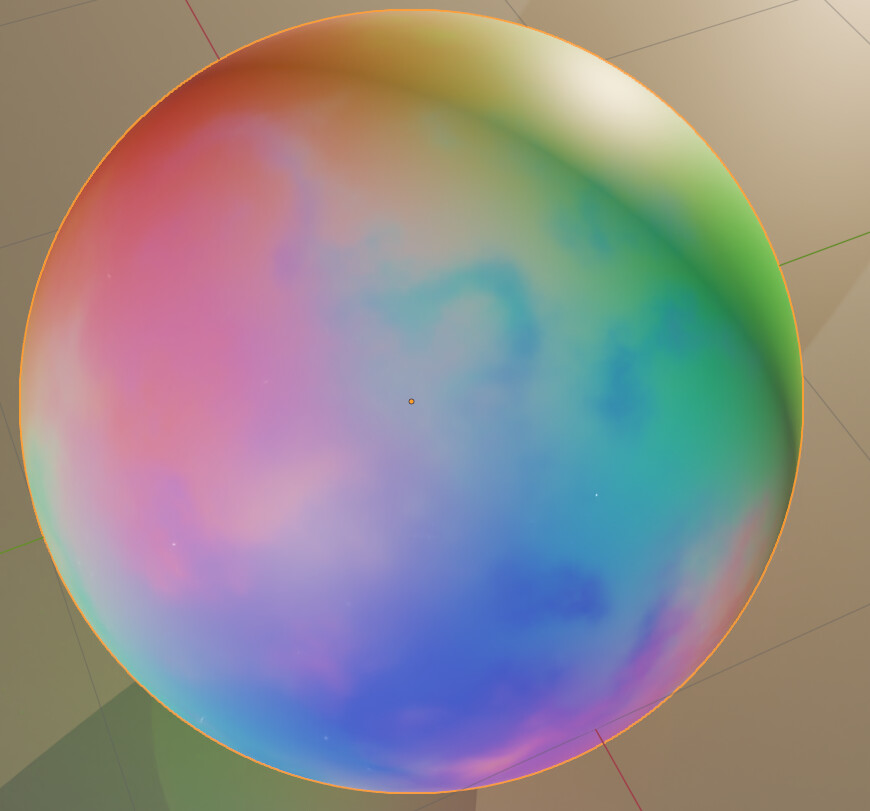
Example application:
I constructed a randomized coordinate system:
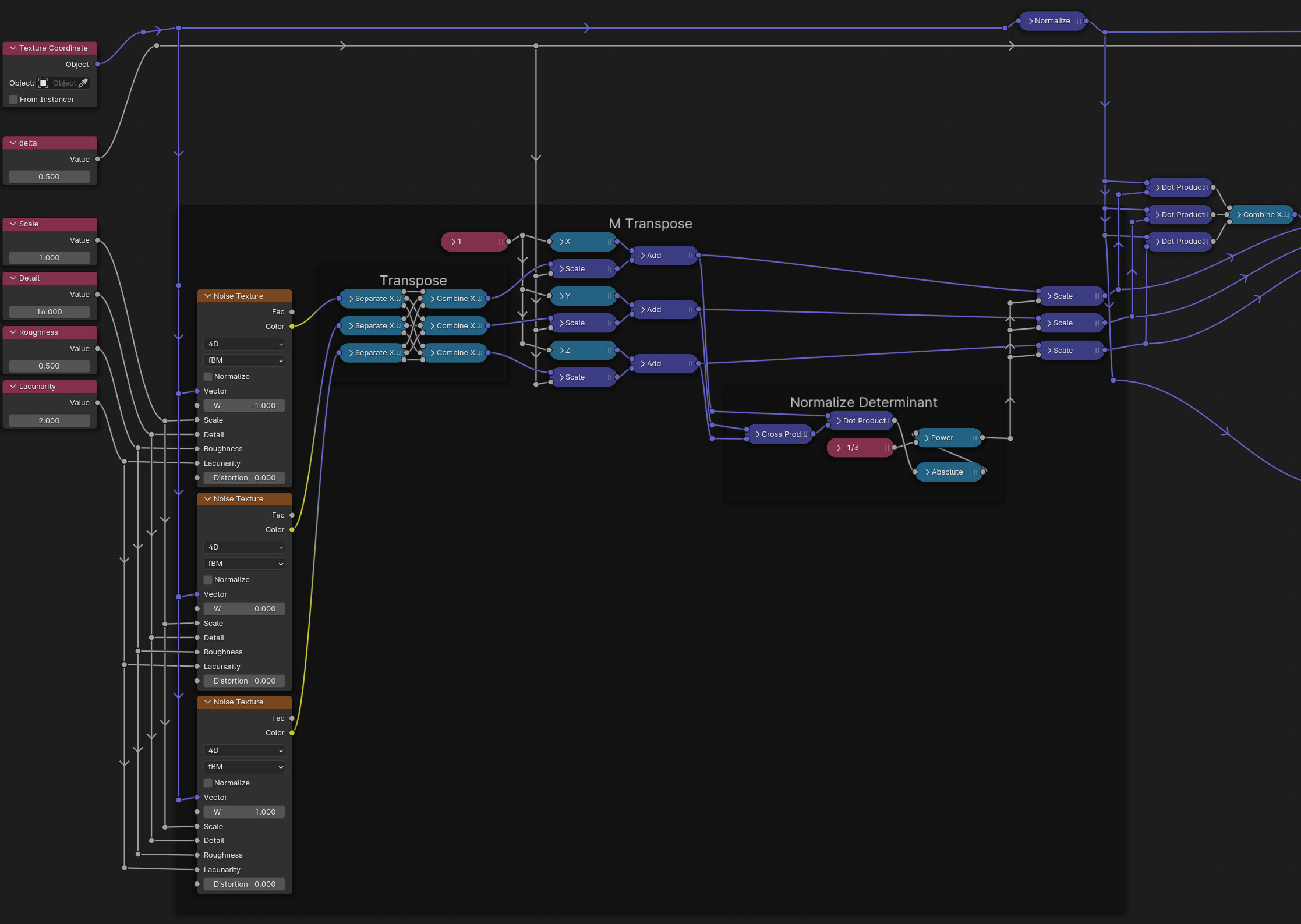
By adding position-dependent noise to 𝟙 and then normalizing the result such that the |determinant| is always 1.
This is like taking the regular XYZ coordinate grid (in object coordinates) and wiggling it a little bit, while ensuring local volumes remain constant.
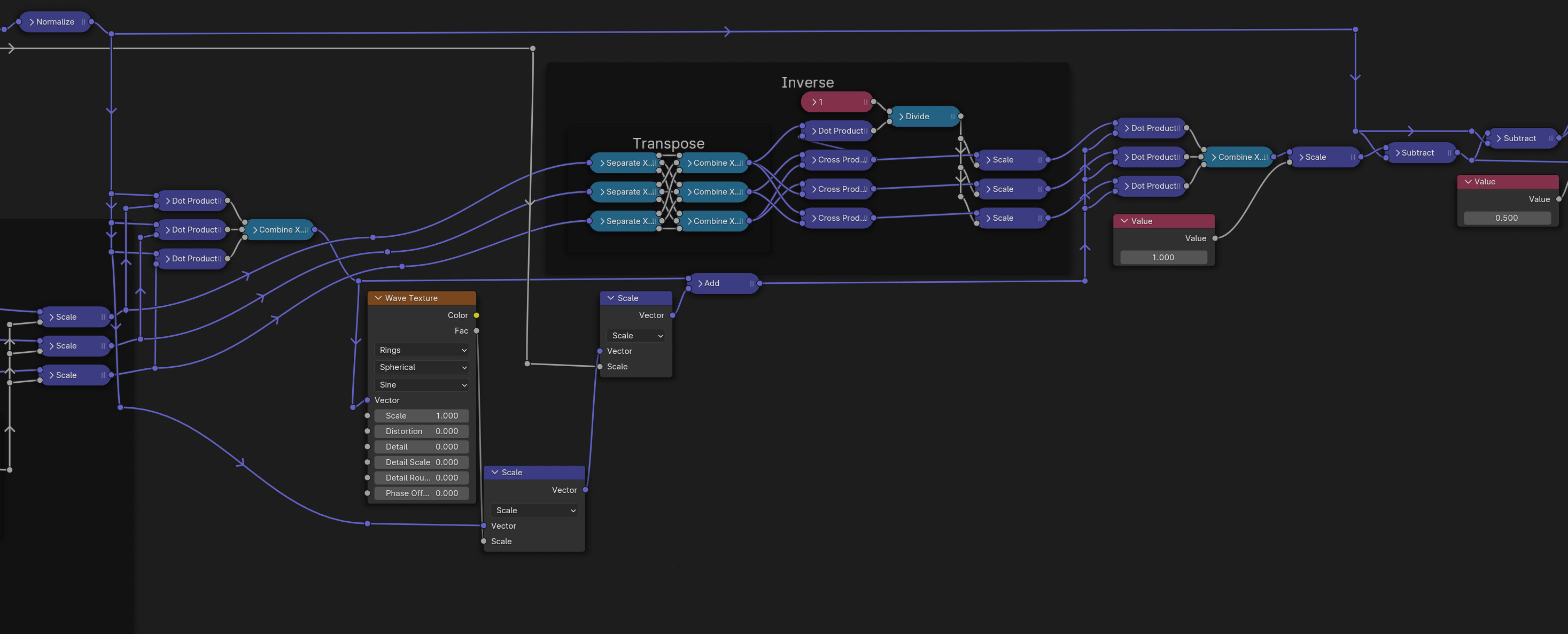
I then took that randomized coordinate grid and used it to drive a radial wave texture, and after, I transformed back using the Inverse block.
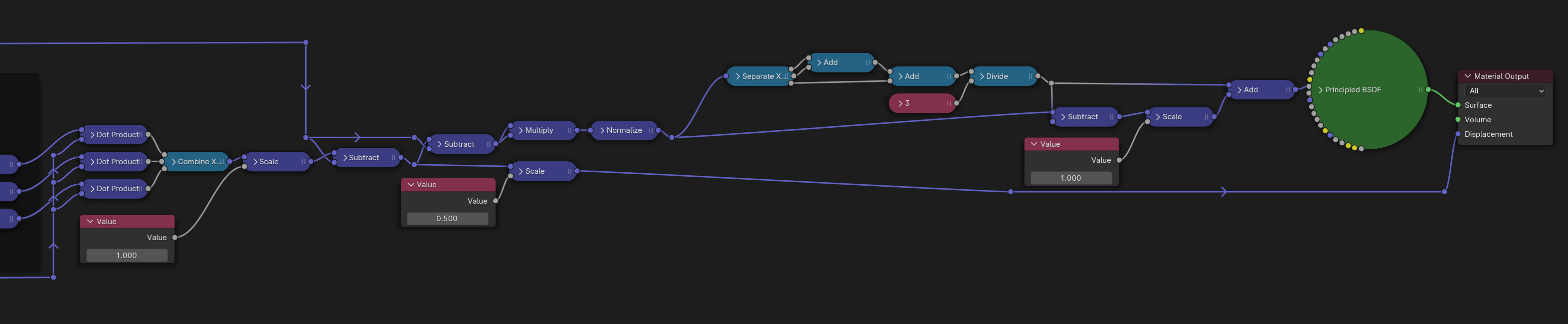
Finally, I just did some generic math to map the resulting texture into colors and displacement.
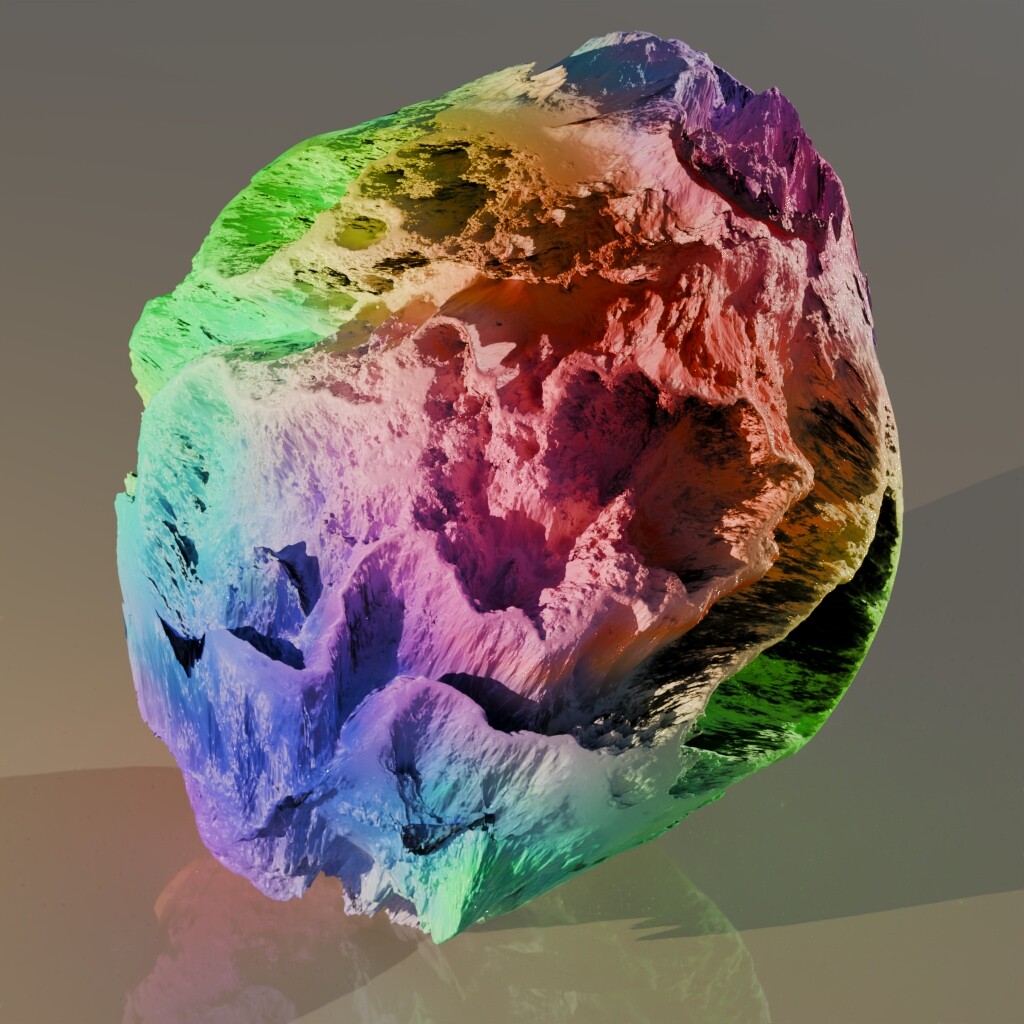
Applied to a sphere of radius 1, I get this result
Obviously there are a bunch of artefacts here from the severe distortion, but other than that it looks like an interesting texture to me. The result is very different from using the distortion slider on the wave texture.
The non-displaced version looks like this:
where you can see the formation of “ridges” or “tendrils” that definitely look quite distinct from the usual kinds of noise.
This is true from all sides: