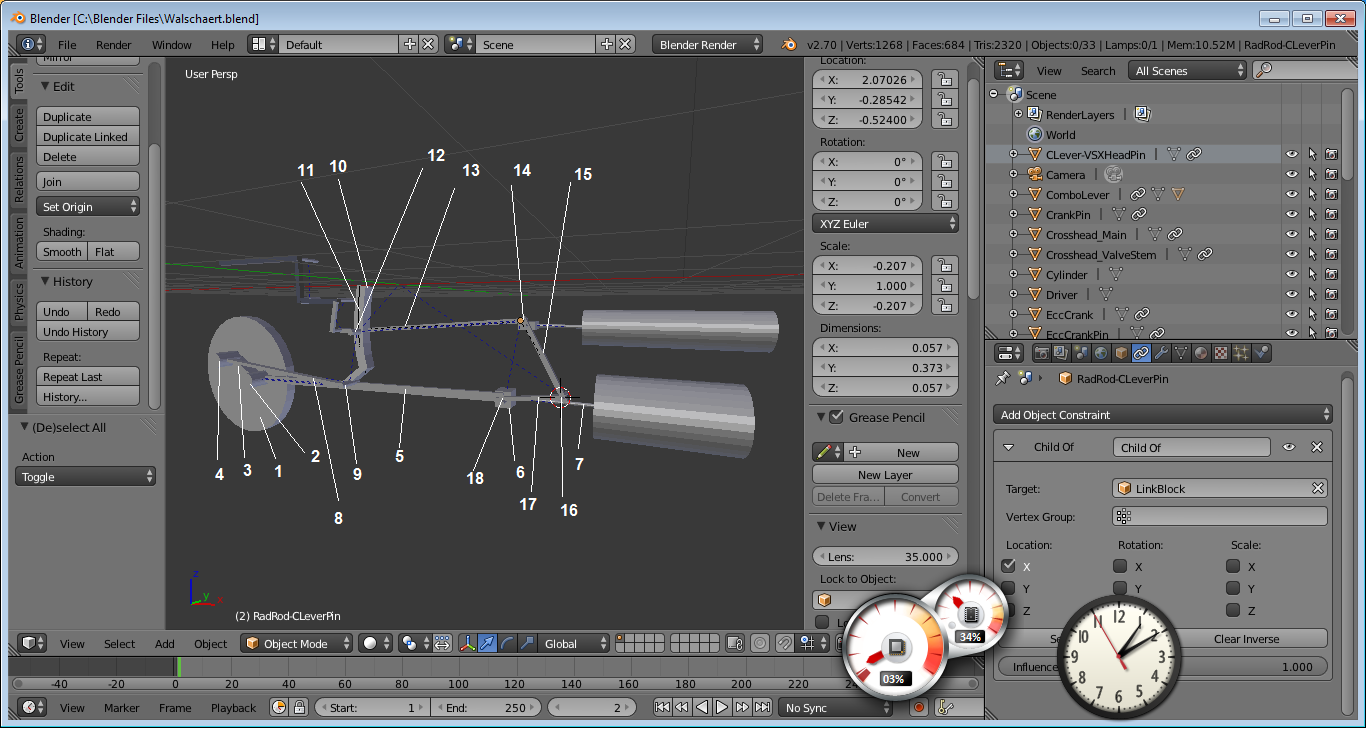
Hello. I am trying to animate Walschaert Valve Gear using constraints only–no armatures, bones or lattices. Part of the inspiration comes from Neal Hirsig’s Rocket Steam Locomotive Tutorial. However, I am having a little trouble setting constraints for the Combination lever and union link (see the wiki article for a demonstration). Here’s a list of what I have so far (see attached screenshot) and the constraints that go with each part:
- Driver
- CrankPin–Child of: Driver
- Eccentric Crank–Child of: CrankPin
- Eccentric CrankPin–Child of: Eccentric Crank
- Main Rod–Child of: CrankPin; Locked Track: Crosshead_Main (To X, Lock Y)
- CrossHead_Main–Child of: PistonRod
- PistonRod–Child of: CrankPin (X Location only)
- Eccentric Rod–Child of: Eccentric CrankPin; Locked Track: LinkFootPin (To X, Lock Y)
- LinkFootPin–Child of: Eccentric CrankPin (X Location only)
- Link–Damped Track: LinkFootPin (To -Z)
- LinkCurve (Path)–Child of: Link
- LinkBlock–Clamp to: LinkCurve
- Radius Rod–Child of: Radius Rod-Combo Lever Pin; Damped Track: LinkBlock (To -X)
- Radius Rod-Combo Lever Pin–Child of: LinkBlock (X Location only)
- Combo Lever–Child of: Radius Rod-Combo Lever Pin
- Combo Lever-Union Link Pin
- Union Link
- Union Link-Crosshead Pin–Child of: Crosshead_Main
If anyone knows how to make the combo lever and union link work properly (as shown in the first animated GIF in the Wiki article) with constraints only (no bones, armatures or lattices) please let me know. I also wanna know how to rig the reverse shaft (L-shaped piece in the above pic) like in the second GIF on the wiki article. Thanks in advance.