I have been struggling with an issue for about two days. I am not sure how to explain it, so topic might not be exact. A picture resembling what I want to create:
And the blender file of how far (far away) I have gotten:
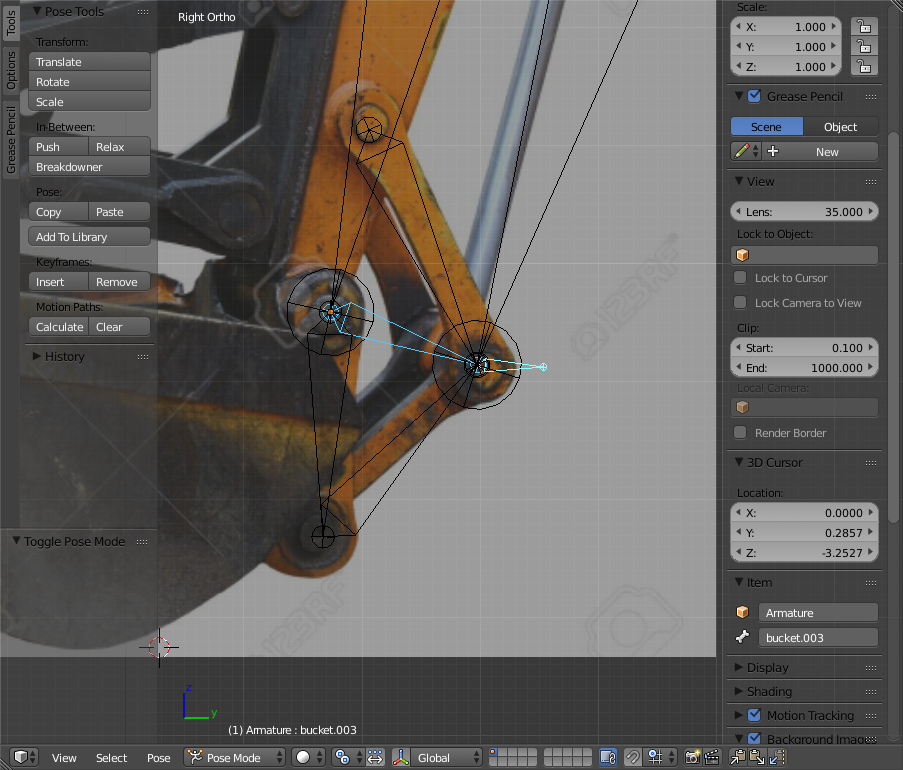
When rotating the bone called “Bone to grab for movement”. The rotation bone is not constrained to axis, but the problem is illustrated fine in “side view”.
The problem is the two bones called Flexi bone upper and lower. They do not seem to update as I would like to and do create some “flickering” issues.
Hope someone out there have a good way to solve this
Looked at your file… You have a cyclic dependency going on there, that’s the jumping bit you see. Go from pose mode to edit mode & back to pose mode and check the console for errors… You can’t target ‘cross’ target bone constraints like that, you need to find another way to connect the two tips of the bones.
I’d add in the two selected bones in that image. The first larger bone I’d add a driver to the only axis it can rotate on, using the bottom most bone as the target. Also add a driver on the bone’s y scale. You’ll have to set up custom control curves in the graph editor to make the drivers work correctly. Use constant control curves and maybe start dailing it in by slowly rotating the control bone.
The second smaller bone would be a connected child of the first bone and it’s just a target bone. It would be a target bone for the hydrualic cylinder, and the two other ‘frame’ bones. Use track to constraints on the frame arm bones, adjust the drivers to get it close to real, and change to stretch-to constraints. No one will notice them parts stretching. The use of the target bone avoids the ‘cross’ targetting you had.
Or - you could use a simple IK chain, see the enclosed blend file, just rotate the bucket bone to operate the bucket and rotate the arm bone to operate the arm.
I have added some very basic meshes so you can see how it all works, feel free to dissect the armature and ask any questions as you like. Note the chain length on the IK constraint on bone “Link-2”, it is important! This method can be simply expanded to cater for the main jib. Also note that the cylinder and piston bones do NOT inherit scale from the stroke bone, this too is important. Pay close attention to the bone parenting in the armature.
Cheers, Clock.
EDIT
Just realised I did not assign the arm mesh - sorry!
Thanks both of you! I played around with the suggestions from revolt_randy and came up with some close concepts: http://www.pasteall.org/blend/35642 but I am not sure I understood it correctly. The IK method from clockmender worked perfect! I did manage to utilise this, and I even got some good tips for pistons there too! I see you have a youtube channel, and I have been looking on youtube for this also, so a tip for a movie just there Both video channels bookmarked!
I do my tutorials in written form on my website or in the Tutorials Section here, never video ones as I end up swearing and getting the commentary wrong - such is life.