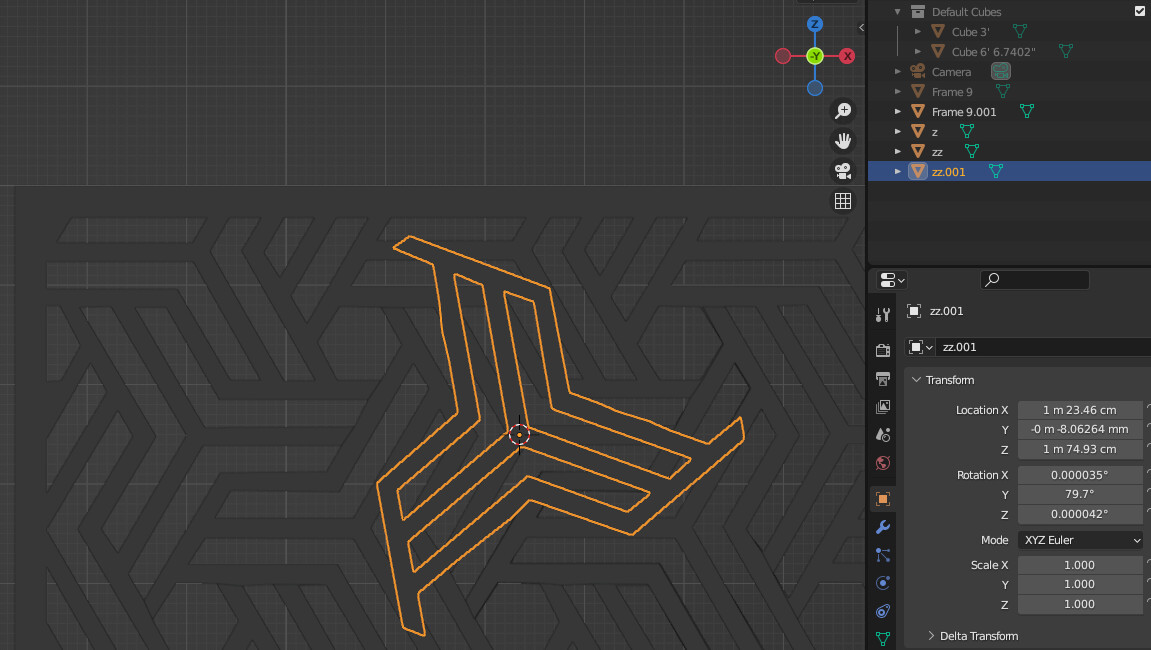
I’m looking straight down the Y axis and using R to rotate
But values other than the Y axis are being changed slightly. Has it always been like this?
I’m looking straight down the Y axis and using R to rotate
But values other than the Y axis are being changed slightly. Has it always been like this?
I do not have any proof of my theory, but I suspect rotation in Blender is handled via Quaternions internally. Therefore in the conversion process between Quaternions and Euler-Angles, floating point imprecissions will arise.
I think you’ll get that if you don’t explicitly constrain rotation to an axis.
Hi there!
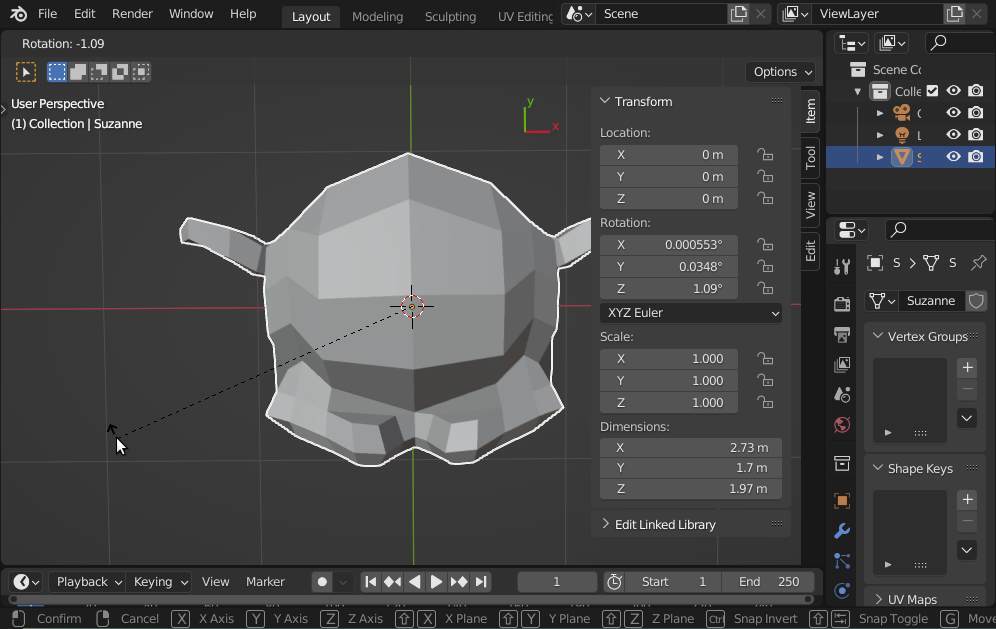
I’m curious. What if you Num7 for top view, and use R and Z and 80 (or 90, what you wish). Not by hand. The end of the process, do you still see a difference in X and Y?
Also make sure to apply scale, and if not used or relevant, you can apply position and rotate as well beforehand. If you need to tweak rotation afterwards, rather don’t apply it ofc. ![]()
Because we can’t see this: Are you sure this is Top Orthographic ?? If you rotated it slighty but it almost looks like ortho…
Can confirm that this only happens in the Y orthographic view (X and Z views work fine. May have to report as a bug.) - I also suspect it is due to floating-point error as @Patrick has pointed out… The workaround is as @Hadriscus pointed out: press R then constrain with Y… that forces it into “Euler mode”.
Good luck.
Well that would explain a hell of a lot of things that I noticed were crooked months and years after I made them.
I’m not entirely sure ! that was just a suggestion but it may not be the cause.
Ups… yes in Z-X… sorry… in 3.2.2 and 3.3.0 under linux also…
same problem on WIn
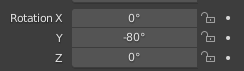
but only when using the R key
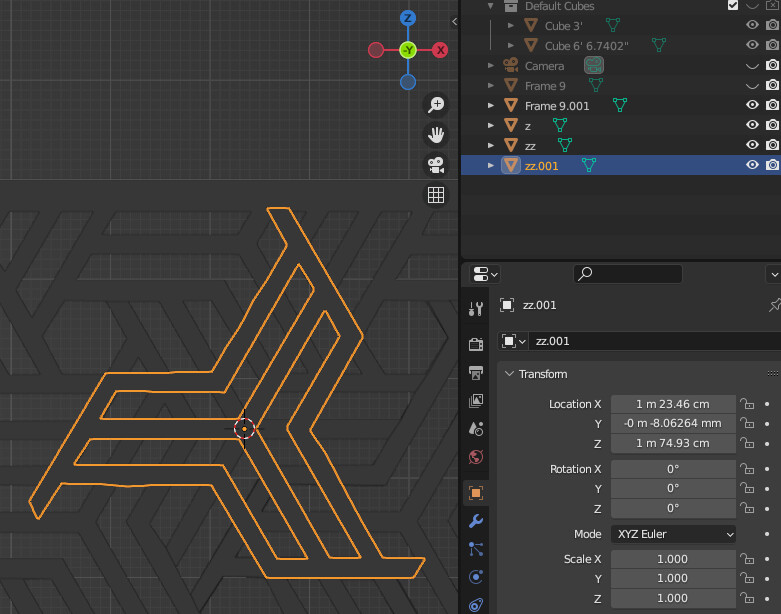
if you use R Y then don’t see this error
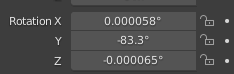
mind you the error is like 3 X E-6 degrees
i mean this is super small angle
but still strange that other way to rotate don’t give this error
make a bug report and see what happen
let us know the answer - should be interesting
happy bl