Good evening.
I tried two new “wheel” and “wing” robots but haven’t given them any equipment yet.
Hello, after having made good progress in my first robots, I am now alternating between updating the code of my main character and modeling his equipments.
My latest update includes a combat system overhaul with one directional attack button instead of four, and modeling an armor made from the body shell of small robots.
Hello.
I updated my biped with the “shins” on the outside and the upper “thighs” a little bigger.
I’m going to modify the propulsion system of the winged version which currently has a reactor at the back of each wing, as these don’t allow the robot to lift without moving forward, so I’m thinking of making a propeller in each wing which will be able to turn towards the ground or the rear.
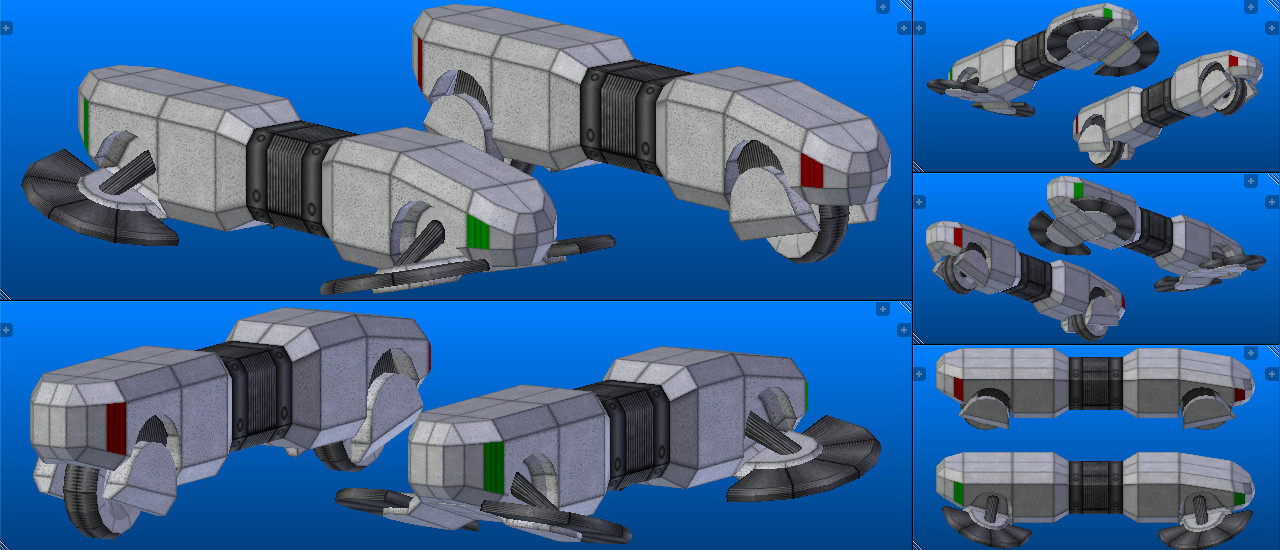
Finally two last small robots, one with a wheel and two antennas and the other with two reactors and two cameras. These robots are supervisors and / or information relays.
Hello, here I am again after coming back to the project some time ago.
Since then I made the skeleton of each robots, and I thought about moving the rotation currently at the big robot’s feet to the middle of its shins or thighs.
Beside that I mainly tried to debug the script of my character that I hadn’t touched for a long time and I have a problem of collision with the ground because my character go though it and a raycast don’t find it.
My character is in “dynamic” physic mode and my ground in “static” physic mode with the “actor” option checked.