Does anybody have an idea as to how best to unilaterally assign a simple object; e.g., a meta-ball, to a large volume of LiDAR points? Since they’re basically a big mess of unconnected vertices floating around, there’s no surface for them at render time.
first problem with this
file jas lot of points and is proably huge
so might have to brake it in pieces
then you have a few options to test to add some faces to this sea of points
there is the simple convex command which can add faces to points in space
but may not give a nice object!
there are also some other addon which can deal witht points in space
ask in python forum
ask for point cloud scripts compatible with LIDAR
or try to use meshlab i think have some good algo for that !
I’ll try both avenues and will post outcome here… what happened to Sketchfab ? can we still place it in these posts?
Yes, the number of points can be very huge, but for this test I kept to just under 8k.
I also maybe should have been a little more detailed, the lidar points were exported from my GIS program as a DXF and the Blender dxf importer I’m using handled it beautifully, though I’m guessing that such detail may not matter
You are tracking the idea correctly; only see the points at render time; no lines, no faces. I also want to color them… but first things first
Here are the points in question that I’m playing around with dxf lidar points 02.zip (72.2 KB) NOTE: these points are in real UTM Zone 19n values, real space units, and should be relocated into Blender’s comfort local zone of 0,0 (but you can keep the z values as we’re right at sea level (NAVD88)). You may also prefer to scale things down a bit, particularly if your clipping settings become an issue.
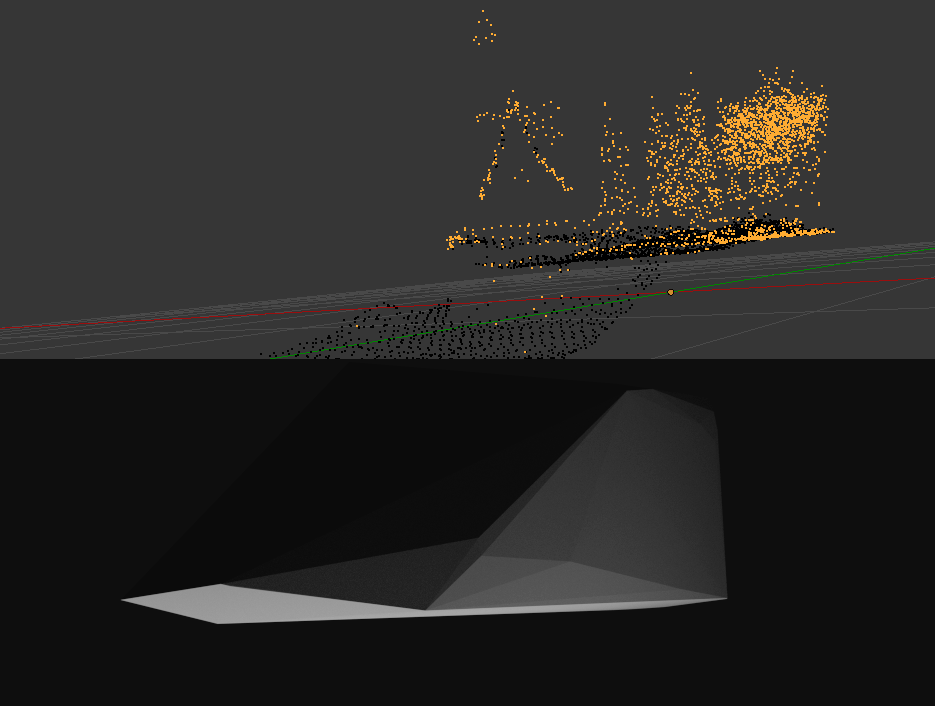
After running the convex hull script, the render only shows faces and not the vertices as in Object Mode:
One way is to parent triangle or quad face to cloud, then dupliverts, make duplicates real, Track To camera all objects.
I used triangle face (3 vertices).
Edit: Maybe easier way is OpenGL Render point cloud with transparent background and use Gimp to colorise pixels with brush.
Yes. I made triangle face and parent to point cloud (file at post #11), then point cloud dupliverts and make duplicates real. Then added Track To camera constraint all of those triangle faces. Then just a few colors to triangles and render.
and 2) it might be prettier… but the first go at this has been an exercise in patience (still waiting on Blender to finish) as well as the lesson not to try this again with the metaball look
None the less, I think your idea is solid and as soon as I’ve regained the upper hand, I’ll flush ram and start fresh.
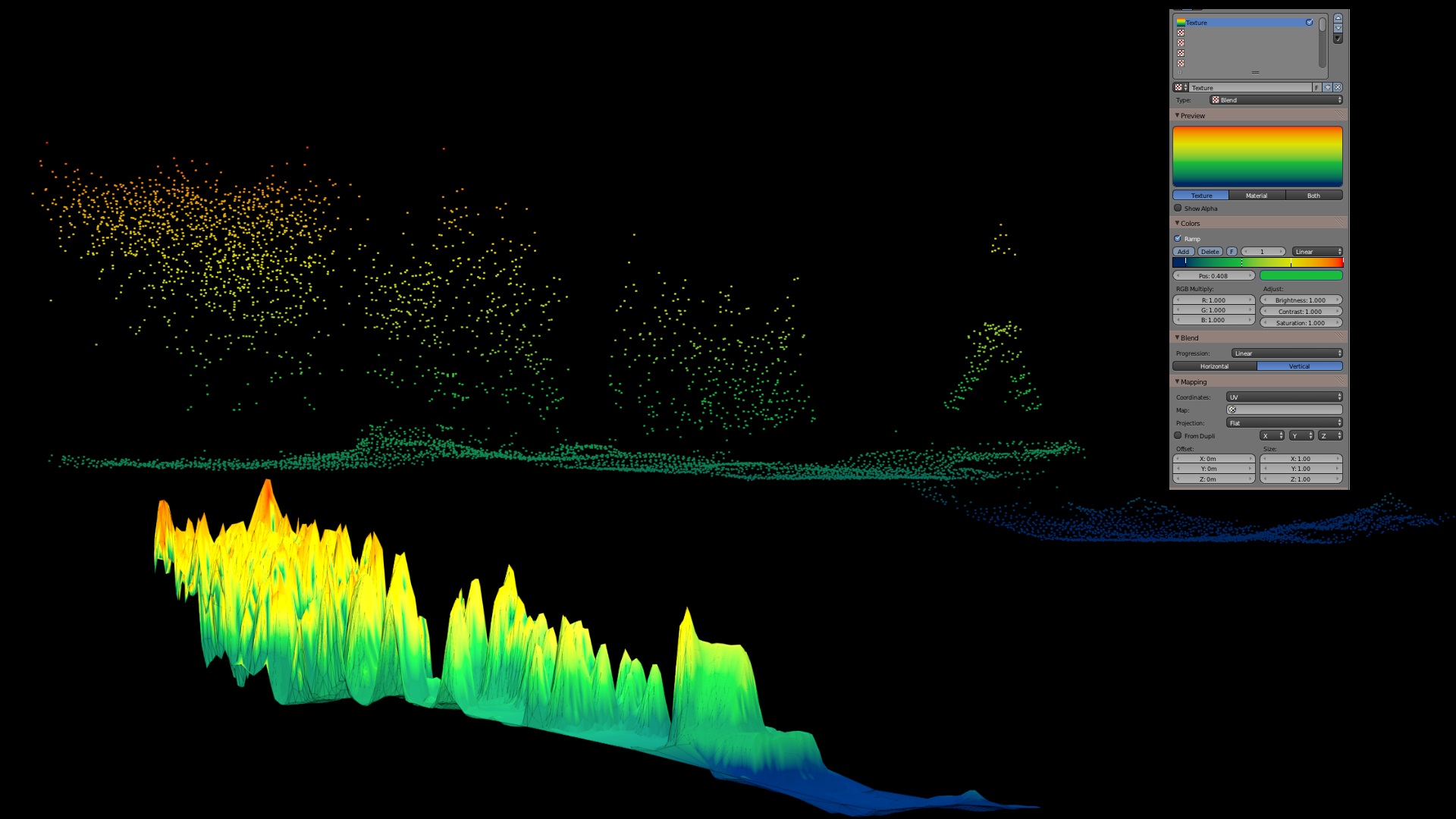
I have tried that Blender addon, its quite fast and Meshlab also gives good results. Above image botton part has made with Delaunay Voronoi addon.
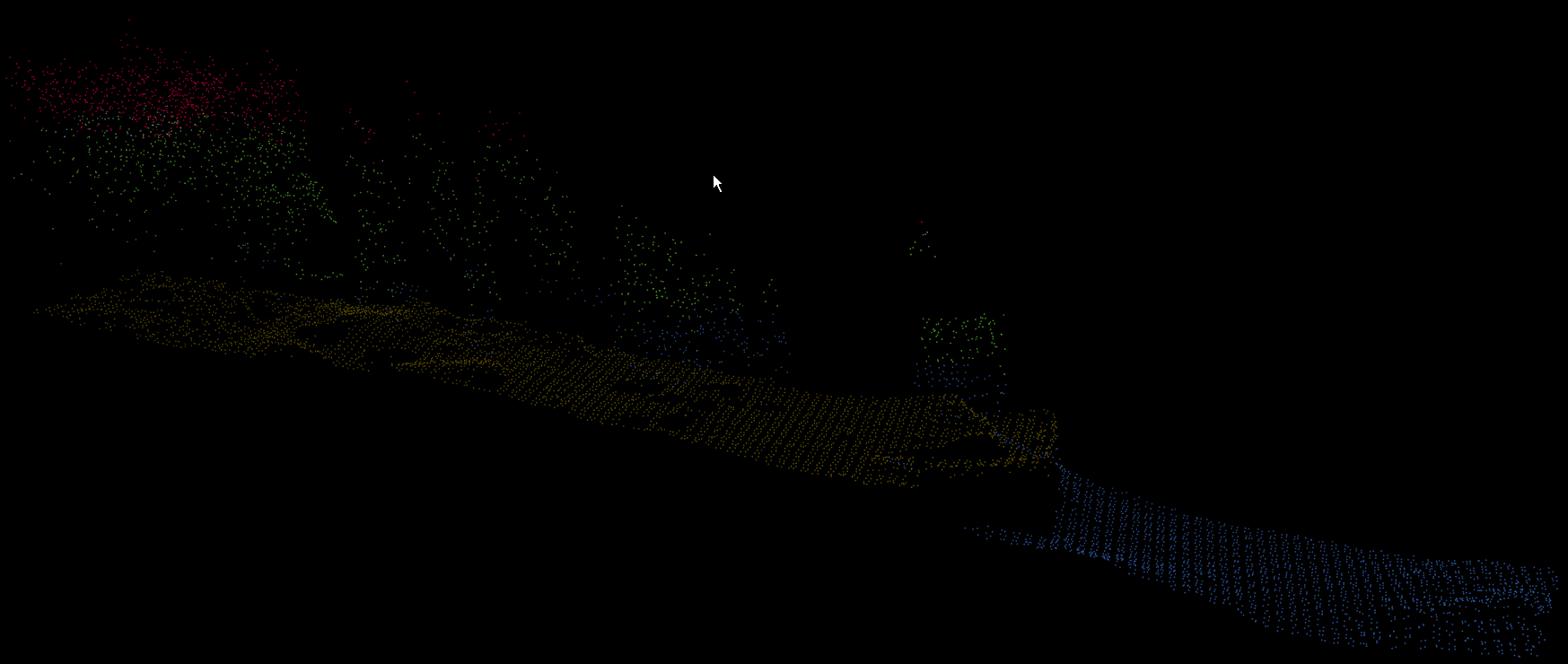
Some free programs shows point cloud height colors directly without any rendering, like CloudCompare.
Color by elevation is one thing I’ll play around with, but this current study is associated with vetting a piece of software and the user defined values that are getting plugged into its algorithm. If you’re not interested in the details, feel free to stop reading;)
MCC-LIDAR will look at the [01] Unclassified lidar points and re-classify them according to (2) user inputs; threshold and scale. s values are linked with point density where as threshold is still voodoo to me. The bottom line: new ground points emerge and when tweaked to the sweet spot, will render a more accurate bare-earth model. So for now, color schemes will be limited; [01] 102,102,153 and for [02] 153,204,153 (RGB).
I very much appreciate all of your help and all of the other helpful voices here on the forum.